
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Studenci mogą skorzystać z tutoriali, jeśli mają jakiekolwiek problemy z utworzeniem, zmianą nazwy lub zapisaniem projektu. Chodź i monitoruj uczniów, aby upewnić się, że wykonali wszystkie kroki.
Programista powinien wykonać następujące kroki:

-
Otwórz menu Plik .
-
Wybierz Otwórz przykłady.
-
Wybierz i otwórz szablon autopilota .
-
Nazwij swój projekt Velocity Remix.
-
Zapisz swój projekt.
![]() Zestaw narzędzi nauczyciela
-
Zachowania
Zestaw narzędzi nauczyciela
-
Zachowania
Jak wspomniano wcześniej, zachowania są sposobem na opowiedzenie o działaniach robota. Jednym ze sposobów nakłonienia uczniów do myślenia o zachowaniach i organizowania działań w sekwencję jest poproszenie uczniów o oznaczenie różnych części projektu za pomocą bloku [komentarz] . Uczniowie mogą oznaczać różne zachowania wynikające z wyzwań w trakcie trwania projektu. Aby uzyskać więcej informacji na temat korzystania z bloku [komentarz] , skorzystaj z pomocy .
W tagu Jesteś tym! wyzwaniem, uczniowie proszeni są o zaprogramowanie autopilota tak, aby szybko skręcał, aby uniknąć oznaczenia, jechał powoli, aby kogoś oznaczyć, a następnie ponownie szybko skręcał, aby uciec. Zobacz poniższy przykład użycia bloku komentarz do opisania sekwencji zachowań:

Możesz także poprosić uczniów, aby wyjaśnili, w jaki sposób będą planować te wyzwania, biorąc pod uwagę to, jak chcą i czego oczekują od robota.
Oznacz, jesteś tym!
Skręć szybko, jedź powoli, skręć szybko, aby zagrać w berka!
-
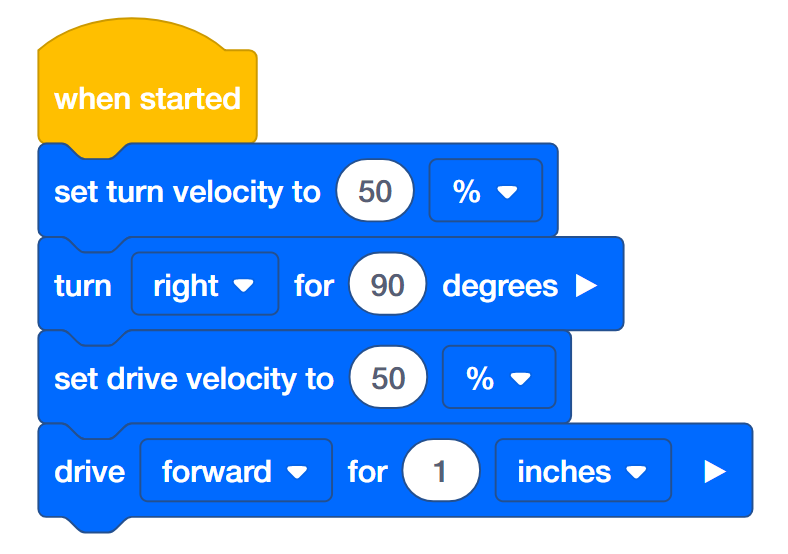
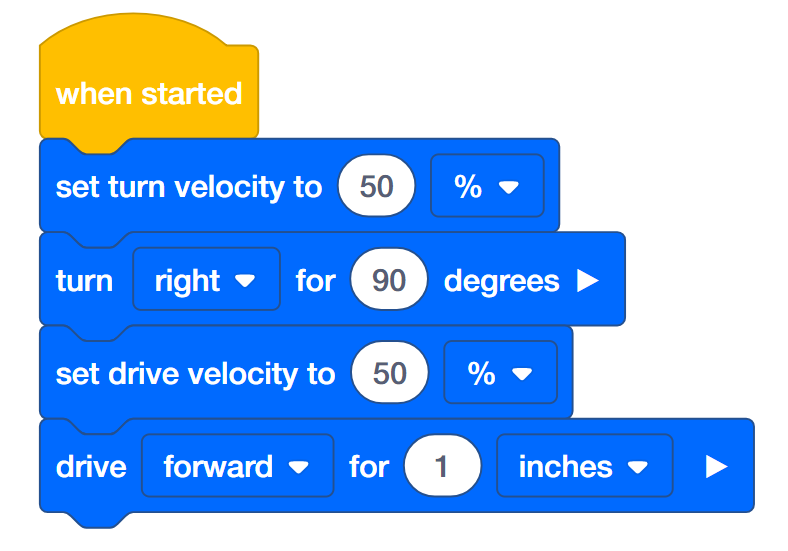
Robot chce zagrać w tag – gotowe! Programiście, użyj bloków [ustaw prędkość skrętu], [skręć dla], [ustaw prędkość jazdy] i [jedź dla], aby zaprogramować autopilota tak, aby skręcał szybko, aby uniknąć oznaczenia, jechał powoli, aby kogoś oznaczyć, a następnie ponownie szybko skręcał uciekać! Procent prędkości podczas skręcania powinien być co najmniej dwukrotnie większy niż procent prędkości podczas jazdy. Poniższy projekt został rozpoczęty, ale nieukończony. Potrzebuje więcej bloków i ustalonych prędkości.
-
Programiście, zapisz projekt Tag i pobierz do mózgu.
-
Operator, uruchom Tag projekt.
-
Czy robot skręca szybko, jedzie powoli, a następnie ponownie szybko skręca?
-
Rejestratorze, rób notatki na temat zachowania robota.
Dodatkowe wyzwanie: Niech autopilot odtworzy dźwięk, gdy kogoś oznaczy!
![]() Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
-
Ustaw nieruchomy obiekt, np. książkę, którą robot będzie oznaczać, aby naśladować oznaczanie osoby.
-
Nauczyciel może ograniczyć odległości dojazdu, jeśli przestrzeń jest ograniczona.
-
Uczniowie powinni pracować w swoich grupach, wykonując swoje indywidualne role.
-
Konstruktor powinien sprawdzić, czy robot jest przygotowany do uruchomienia projektu.
-
Programista powinien dokonać zmian zgodnie z zaleceniami.
-
Operator powinien uruchamiać projekty na robocie.
-
Protokolant powinien udokumentować swoją pracę i wyniki w swoich notatnikach inżynierskich.
-
Poproś uczniów, aby sprawdzili, kiedy ukończą to ćwiczenie, i pokazali lub uruchomili swoje projekty.
Aby uzyskać rozwiązanie problemu Tag You're It!, kliknij z poniższych linków (Dokument Google/.docx/.pdf).
Chroń zamek!
Poruszaj się po placu, aby chronić zamek przed intruzami!
-
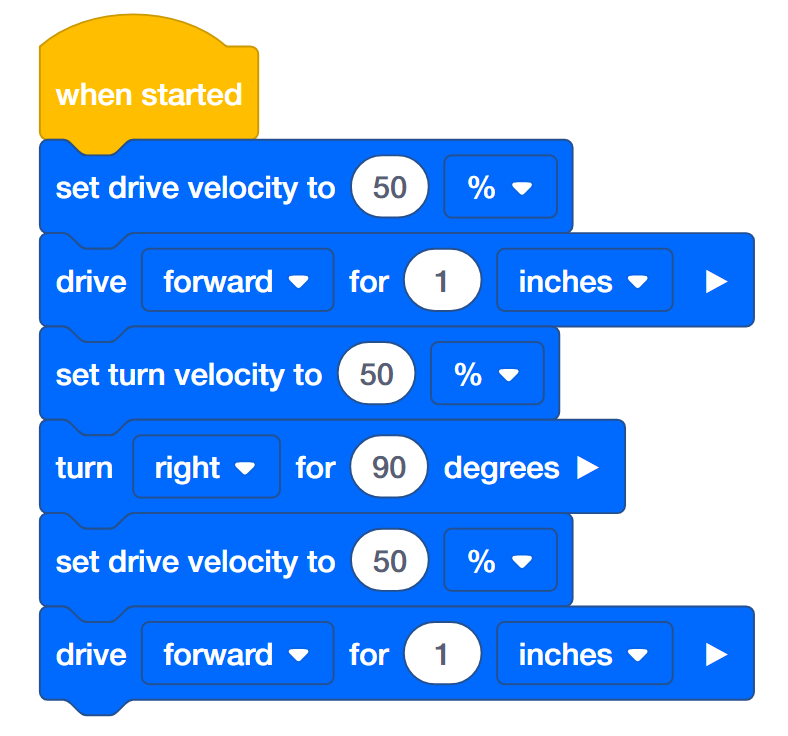
Twój król poprosił cię o ochronę zamku! Musisz objechać kwadratowy zamek, aby upewnić się, że jest on bezpieczny przed intruzami! Programiście, użyj ustawionej prędkości obrotu, obrotu dla, prędkości napędu i napędu dla bloków, aby zaprogramować Autopilota, aby poruszał się po kwadracie. Autopilot powinien jechać szybko po bokach placu, ale powoli skręcać na zakrętach. Poniższy projekt został rozpoczęty, ale nieukończony. Potrzebuje więcej bloków i ustalonych prędkości.
-
Programiście, zapisz projekt Castle i pobierz do mózgu.
-
Operator, uruchom projekt Zamek.
-
Czy robot porusza się szybko po kwadracie, ale skręca powoli na rogach?
-
Rejestratorze, rób notatki na temat zachowania robota.
Dodatkowe wyzwania:
-
Pozwól, aby dotykowa dioda LED autopilota wyświetlała inny kolor podczas jazdy po obu stronach kwadratu.
-
Obwód kwadratowego zamku, którego należy strzec, wynosi 20 cali. Zaprogramuj robota, aby poruszał się po obwodzie.
-
Powierzchnia kwadratowego zamku, którego należy strzec, wynosi 49 cali. Oblicz długość każdego boku i poruszaj się po kwadracie zajmującym ten obszar.
![]() Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
-
Nauczyciel może ograniczyć odległości dojazdu, jeśli przestrzeń jest ograniczona.
-
Uczniowie powinni pracować w swoich grupach, wykonując swoje indywidualne role.
-
Konstruktor powinien sprawdzić, czy robot jest przygotowany do uruchomienia projektu.
-
Programista powinien dokonać zmian zgodnie z zaleceniami.
-
Operator powinien uruchamiać projekty na robocie.
-
Protokolant powinien udokumentować swoją pracę i wyniki w swoich notatnikach inżynierskich.
-
Poproś uczniów, aby sprawdzili, kiedy ukończą to ćwiczenie, i pokazali lub uruchomili swoje projekty.
Aby zapoznać się z rozwiązaniami dotyczącymi ochrony zamku!, kliknij z poniższych linków (Google Doc/.docx/.pdf).
Kelner robota
Nie rozlewaj napojów!
-
Twój robot szkoli się na kelnera w nowej restauracji w mieście. Zaprogramuj robota-kelnera tak, aby mógł szybko się poruszać, nie rozsypując tego, co niesie! Użyj dystansu 6x, aby symulować jedzenie lub napoje, które kelner będzie niósł. Programiście, użyj ustawionej prędkości skrętu, obrotu dla, ustawionej prędkości jazdy i jazdy dla bloków, aby zaprogramować Autopilota tak, aby obrócił się o 360 stopni i przejechał 12 cali tak szybko, jak to możliwe, równoważąc 6-krotną odległość Pitch Standoff w mózgu Autopilota . Poniższy projekt został rozpoczęty, ale nieukończony. Musi mieć ustawione prędkości i odległości.
-
Budowniczy, połóż 6-krotny dystans z zestawu VEX IQ w miejscu, gdzie w mózgu jest zapisane VEX IQ.

-
Programiście, ustaw prędkości i odległości. Następnie zapisz projekt Robot Kelner i pobierz do mózgu.
-
Operator, uruchom projekt Robot Kelner.
-
Czy robot skręca i jedzie, utrzymując wiązkę światła nad mózgiem? Jak szybko robot może się poruszać, zanim wiązka się zesunie?
-
Programiście, testuj coraz większe prędkości, aż znajdziesz granicę. Limit skrętu może różnić się od limitu jazdy. Skorzystaj z informacji z Rejestratora, aby podjąć decyzję, która prędkość jest najlepszym wyborem.
-
Rejestratorze, rób notatki na temat zachowania robota, jego prędkości i tego, czy wiązka odpada. Zanotuj, jak zmieniają się prędkości przy każdym testowaniu projektu.
![]() Zestaw narzędzi dla nauczyciela
-
Projektowanie iteracyjne
Zestaw narzędzi dla nauczyciela
-
Projektowanie iteracyjne
To ćwiczenie skupia się na poproszeniu uczniów o zaangażowanie się w iteracyjny proces projektowania. Studenci proszeni są o przetestowanie swoich projektów przed wprowadzeniem zmian. Zachęć uczniów, aby w pełni zaprojektowali, przetestowali, dokonali zmian w oparciu o opinie i ponownie przetestowali. Korekty prędkości powinny opierać się na wynikach testów i/lub informacjach zwrotnych od pozostałych członków grupy. Zachęć uczniów, aby postępowali zgodnie z iteracyjnym procesem projektowania, zamiast po prostu zgadywać i sprawdzać, aby dojść do wniosku, która prędkość jest najlepsza. Najlepsza prędkość zapewni, że robot-kelner niczego nie rozleje.
Projektowanie iteracyjne jest ważną metodologią projektowania w robotyce, a także w innych procesach projektowania inżynierskiego.
Uczniowie będą także ćwiczyć abstrakcyjne rozumowanie, podejmując decyzję o dostosowaniu prędkości, aby stwierdzić, która z nich jest najlepsza.
![]() Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
Przybornik dla nauczyciela
-
Przypomnienia i rozwiązania
-
Nauczyciel może ograniczyć odległości dojazdu, jeśli przestrzeń jest ograniczona.
-
Uczniowie powinni pracować w swoich grupach, wykonując swoje indywidualne role.
-
Konstruktor powinien sprawdzić, czy robot jest przygotowany do realizacji projektu i czy odstęp 6x Pitch jest prawidłowo umieszczony nad naklejką VEX IQ na mózgu przed każdym testem prędkości.

-
Programista powinien dokonać zmian zgodnie z zaleceniami.
-
Operator powinien uruchamiać projekty na robocie.
-
Protokolant powinien udokumentować swoją pracę i wyniki w swoich notatnikach inżynierskich.
-
Poproś uczniów, aby sprawdzili, kiedy ukończą to ćwiczenie, i pokazali lub uruchomili swoje projekty.
Aby znaleźć rozwiązanie dla Robot Waiter, kliknij z poniższych linków (Google Doc/.docx/.pdf)