
![]() 教師のヒント
教師のヒント
プロジェクトの作成、名前変更、または保存で問題が発生した場合、学生はチュートリアルを参照できます。 歩き回って生徒を監視し、生徒がすべての手順を完了していることを確認します。
プログラマは次の手順を完了する必要があります。

-
ファイル メニューを開きます。
-
例を開くを選択します。
-
Autopilot テンプレートを選択して開きます。
-
プロジェクトに Velocity Remixという名前を付けます。
-
プロジェクト保存し 。
![]() 教師ツールボックス
-
行動
教師ツールボックス
-
行動
前述したように、動作はロボットの動作について語る方法です。 生徒に行動について考えさせ、行動を順序立てて整理させる方法の 1 つは、[コメント] ブロックを使用してプロジェクトのさまざまな部分にラベルを付けさせることです。 学生は、プロジェクト全体の課題からさまざまな行動にラベルを付けることができます。 [コメント] ブロックの使用方法の詳細については、 ヘルプを参照してください
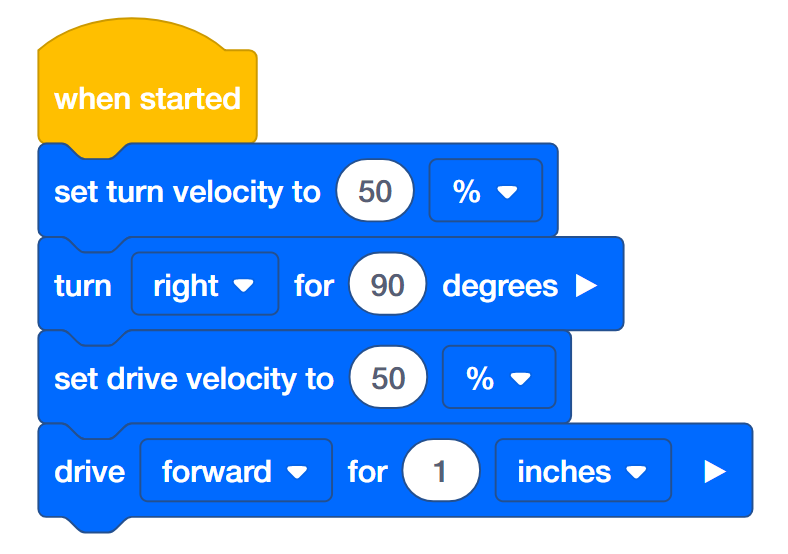
タグではあなたがそれです! この課題では、学生たちは、タグ付けを避けるために素早く方向転換し、誰かにタグ付けするためにゆっくり運転し、その後再び素早く方向転換して逃げるようにオートパイロットをプログラムするように求められます。 コメント ブロックを使用して動作のシーケンスを説明する以下の例をご覧ください。

また、ロボットがどのように動作することを望み、期待するかという観点から、これらの課題にどのように対処するかを生徒に説明してもらうこともできます。
タグ「あなただよ!」
早く曲がって、ゆっくり走って、早く曲がって鬼ごっこをしましょう!
-
ロボットは鬼ごっこをしたいのですが、それはあなたです! プログラマー、[旋回速度の設定]、[旋回]、[運転速度の設定]、および [運転] ブロックを使用して、タグ付けを避けるために素早く旋回するようにオートパイロットをプログラムし、誰かにタグ付けするためにゆっくりと運転し、その後再び素早く旋回するようにプログラムします。逃げる! 旋回の速度パーセンテージは、運転の速度パーセンテージの少なくとも 2 倍である必要があります。 以下のプロジェクトは開始されましたが、未完了です。 より多くのブロックと設定速度が必要です。
-
プログラマー、 タグ プロジェクトを保存し、 それをブレインにダウンロード してください。
-
オペレーター、 実行 タグ プロジェクト。
-
ロボットは素早く回転し、ゆっくりと運転し、その後再び素早く回転しますか?
-
レコーダー、ロボットの動作についてメモを取ってください。
ボーナスチャレンジ: オートパイロットが誰かをタグ付けしたらサウンドを再生します。
![]() 教師ツールボックス
-
リマインダーとソリューション
教師ツールボックス
-
リマインダーとソリューション
-
ロボットが人間のタグ付けを模倣してタグ付けする本などの静止物体を設定します。
-
スペースが限られている場合、教師は走行距離を制限できます。
-
学生はグループ内でそれぞれの役割を担って取り組む必要があります。
-
ビルダーは、ロボットがプロジェクトを実行する準備ができているかどうかを確認する必要があります。
-
プログラマーは指示に従って変更を行う必要があります。
-
オペレーターはロボット上でプロジェクトを実行する必要があります。
-
記録者は自分の作業と結果をエンジニアリング ノートに文書化する必要があります。
-
生徒に、このアクティビティが完了したらチェックインして、プロジェクトを表示または実行してもらいます。
Tag You're It! の解決策については、次のリンクの クリックしてください (Google Doc/.docx/.pdf)。
城を守れ!
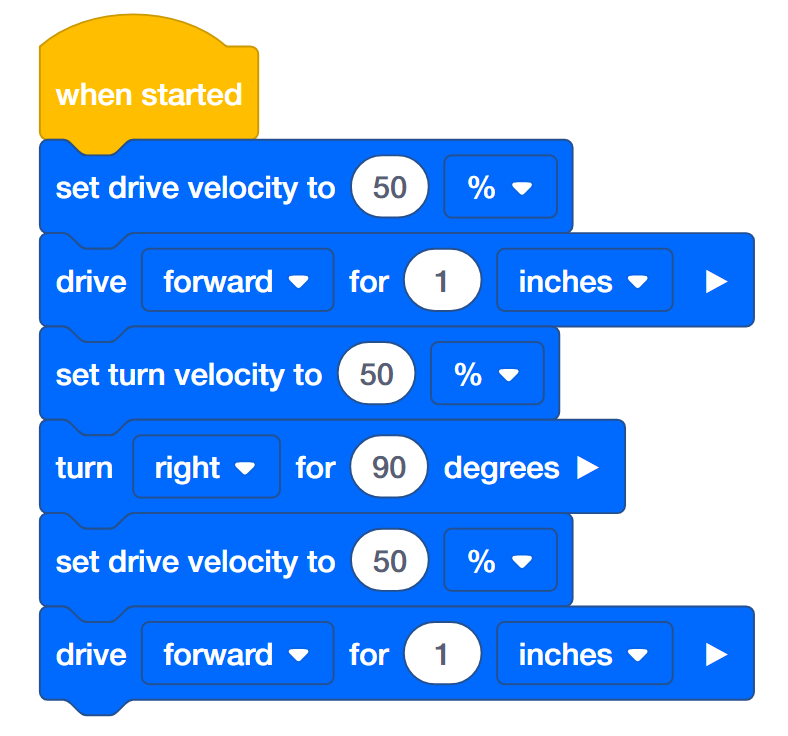
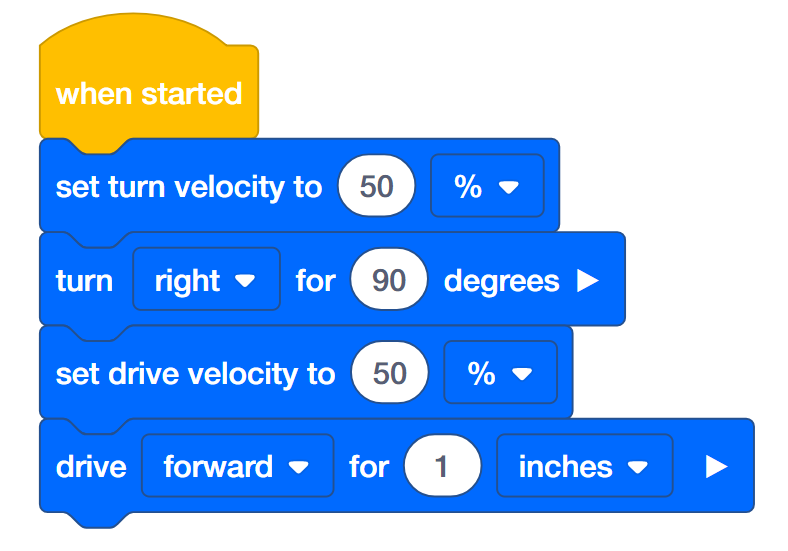
正方形に移動して侵入者から城を守りましょう!
-
あなたの王はあなたに城を守るように頼んだのです! 四角い城の周囲を車で回り、侵入者から安全であることを確認する必要があります。 プログラマーは、 で旋回速度を設定し、 で旋回、 で駆動速度を設定し、 で駆動の のブロックを使用して、自動操縦装置が正方形に移動するようにプログラムします。 オートパイロットは広場の側面に沿って素早く運転しますが、角ではゆっくりと回転します。 以下のプロジェクトは開始されましたが、未完了です。 より多くのブロックと設定速度が必要です。
-
プログラマー、Castle プロジェクトを保存して、脳に ダウンロード してください。
-
オペレーター、 実行 Castle プロジェクト。
-
ロボットは四角い形では速く動きますが、角ではゆっくりと回転しますか?
-
レコーダー、ロボットの動作についてメモを取ってください。
ボーナスチャレンジ:
-
自動操縦のタッチ LED が正方形の両側を走行している間、異なる色を表示します。
-
守る必要がある四角い城の周囲は 20 インチです。 ロボットが周囲を移動するようにプログラムします。
-
守る必要がある四角い城の面積は 49 インチです。 各辺の長さを計算し、領域を覆う正方形内を移動します。
![]() 教師ツールボックス
-
リマインダーとソリューション
教師ツールボックス
-
リマインダーとソリューション
-
スペースが限られている場合、教師は走行距離を制限できます。
-
学生はグループ内でそれぞれの役割を担って取り組む必要があります。
-
ビルダーは、ロボットがプロジェクトを実行する準備ができているかどうかを確認する必要があります。
-
プログラマーは指示に従って変更を行う必要があります。
-
オペレーターはロボット上でプロジェクトを実行する必要があります。
-
記録者は自分の作業と結果をエンジニアリング ノートに文書化する必要があります。
-
生徒に、このアクティビティが完了したらチェックインして、プロジェクトを表示または実行してもらいます。
「城を守れ!」の解答については、次のいずれ のリンクをクリックしてください (Google Doc/.docx/.pdf)。
ロボットウェイター
飲み物をこぼさないでください!
-
あなたのロボットは、町の新しいレストランでウェイターになるための訓練を受けています。 ロボットのウェイターが運んでいるものをこぼさずに素早く動けるようにプログラムしましょう。 6x ピッチ スタンドオフを使用して、ウェイターが運ぶ食べ物や飲み物をシミュレートします。 プログラマーは、 で旋回速度を設定し、 で旋回、 で駆動速度を設定し、 で駆動の のブロックを使用して、オートパイロットが 360 度旋回して、オートパイロットのブレイン上で 6 倍ピッチ スタンドオフのバランスを取りながら、できるだけ速く 12 インチ駆動するようにプログラムします。 以下のプロジェクトは開始されましたが、未完了です。 速度と距離を設定する必要があります。
-
ビルダー、脳に VEX IQ が書かれている場所に、VEX IQ キットの 6x ピッチ スタンドオフを置きます。

-
プログラマ、速度と距離を設定してください。 次に、Robot Waiter プロジェクトを保存し、brain にダウンロード 。
-
オペレーター、 ロボットウェイタープロジェクトを実行 。
-
ロボットは脳の上にビームを当てたまま回転して走行するのでしょうか? ビームが滑り落ちてしまう前に、ロボットはどのくらいの速さで移動できるでしょうか?
-
プログラマ、限界が見つかるまでどんどん速度をテストしてください。 旋回の限界と走行の限界は異なる場合があります。 どの速度が最適な選択であるかを決定するには、レコーダーからの情報を使用します。
-
レコーダー、ロボットの動作、速度、ビームが落ちるかどうかをメモしてください。 プロジェクトがテストされるたびに速度がどのように変化するかを記録します。
![]() 教師ツールボックス
-
反復設計
教師ツールボックス
-
反復設計
このアクティビティは、学生に反復的な設計プロセスに参加してもらうことに焦点を当てています。 学生は、変更を加える前にプロジェクトをテストするように求められます。 完全に設計、テストし、フィードバックに基づいて変更を加え、再度テストするよう生徒に奨励します。 速度の調整は、テストの結果および/または他のグループ メンバーからのフィードバックに基づいて行う必要があります。 どの速度が最適であるかについての結論を得るために、単に推測して確認するのではなく、反復的な設計プロセスに従うよう生徒に奨励します。 最適な速度により
設計は、ロボット工学やその他のエンジニアリング設計プロセスにおける重要な設計手法です。
学生はまた、速度を調整する方法を決定し、どれが最適であるかを結論づけながら、抽象的に推論する練習もします。
![]() 教師ツールボックス
-
リマインダーとソリューション
教師ツールボックス
-
リマインダーとソリューション
-
スペースが限られている場合、教師は走行距離を制限できます。
-
学生はグループ内でそれぞれの役割を担って取り組む必要があります。
-
ビルダーは、速度の各テストの前に、ロボットがプロジェクトを実行する準備ができていること、および 6x ピッチ スタンドオフが脳の VEX IQ デカール上に適切に配置されていることを確認する必要があります。

-
プログラマーは指示に従って変更を行う必要があります。
-
オペレーターはロボット上でプロジェクトを実行する必要があります。
-
記録者は自分の作業と結果をエンジニアリング ノートに文書化する必要があります。
-
生徒に、このアクティビティが完了したらチェックインして、プロジェクトを表示または実行してもらいます。
Robot Waiter の解決策については、次のリンクの かをクリックしてください (Google Doc/.docx/.pdf)