
Uw project opnieuw mixen
![]() Tips voor docenten
Tips voor docenten
De studenten kunnen de tutorials raadplegen als ze problemen hebben met het maken, hernoemen of opslaan van een project. Loop rond en controleer de studenten om ervoor te zorgen dat ze alle stappen voltooien.
De programmeur moet de volgende stappen doorlopen:

- Open het menu Bestand.
- Selecteer Open Voorbeelden.
- Selecteer en open de Autopilot-sjabloon.
- Geef uw project de naam Velocity Remix.
- Sla je project op.
![]() Teacher Toolbox
-
Gedrag
Teacher Toolbox
-
Gedrag
Zoals eerder vermeld, zijn gedragingen een manier om over de acties van de robot te praten. Een manier om studenten na te laten denken over gedrag en acties in een reeks te organiseren, is door studenten verschillende delen van hun project te laten labelen met behulp van het blok [commentaar]. De leerlingen kunnen de verschillende gedragingen van de uitdagingen gedurende het project labelen. Gebruik de Help voor meer informatie over het gebruik van het [comment] -blok.
In de Tag You 're It! uitdaging, worden de studenten gevraagd om de Autopilot te programmeren om snel te draaien om te voorkomen dat ze worden getagd, langzaam te rijden om iemand te taggen en dan snel weer te draaien om weg te rennen. Bekijk het onderstaande voorbeeld van het gebruik van het opmerkingenblok om de volgorde van gedrag te beschrijven:

Je kunt de studenten ook vragen om uit te leggen hoe ze deze uitdagingen zullen plannen in termen van hoe ze willen en verwachten dat de robot zich gedraagt.
Tag dat jij het bent!
Draai snel, rijd langzaam, draai snel om een spelletje tikkertje te spelen!
-
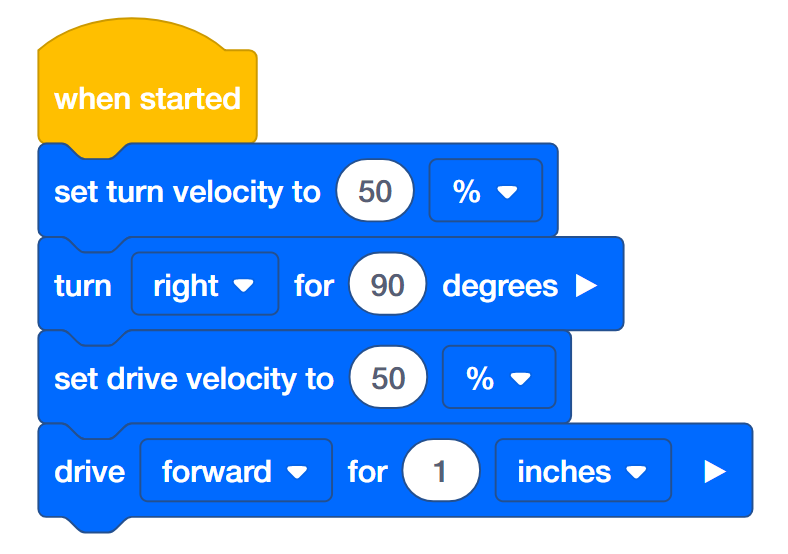
De robot wil een spelletje tikkertje spelen -jijbent het! Programmeur, gebruik de [set turn velocity], [turn for], [set drive velocity] en [drive for] blokken om de Autopilot te programmeren om snel te draaien om te voorkomen dat hij wordt getagd, rijd langzaam om iemand te taggen en draai dan snel weer om weg te rennen! Het snelheidspercentage voor het draaien moet minstens twee keer zo hoog zijn als het snelheidspercentage voor het rijden. Het onderstaande project is gestart maar onvolledig. Het heeft meer blokken en ingestelde snelheden nodig.
- Programmeur, sla het Tag-project op en download het naar de hersenen.
- Operator, voer het Tag-project uit.
- Draait de robot snel, rijdt hij langzaam en draait hij dan weer snel?
- Recorder, maak aantekeningen over het gedrag van de robot.
Bonusuitdaging: laat de Autopilot een geluid afspelen zodra hij iemand tagt!
![]() Teacher Toolbox
-
Herinneringen en oplossingen
Teacher Toolbox
-
Herinneringen en oplossingen
-
Stel een stilstaand object in, zoals een boek, dat de robot zal taggen om het taggen van een persoon na te bootsen.
-
De leerkracht kan de rijafstanden beperken als de ruimte beperkt is.
-
Studenten moeten in hun groepen werken met hun individuele rollen.
-
De Bouwer moet controleren of de robot klaar is om het project uit te voeren.
-
De programmeur moet de wijzigingen aanbrengen zoals aangegeven.
-
De operator moet de projecten op de robot uitvoeren.
-
De recorder moet zijn werk en resultaten documenteren in zijn technische notitieblokken.
-
Laat de studenten inchecken wanneer ze deze activiteit hebben voltooid en hun project(en) weergeven of uitvoeren.
Klik voor de oplossing voor Tag You 're It! op een van de volgende links (Google Doc/.docx/.pdf).
Bescherm het kasteel!
Beweeg je op een plein om het kasteel tegen indringers te beschermen!
-
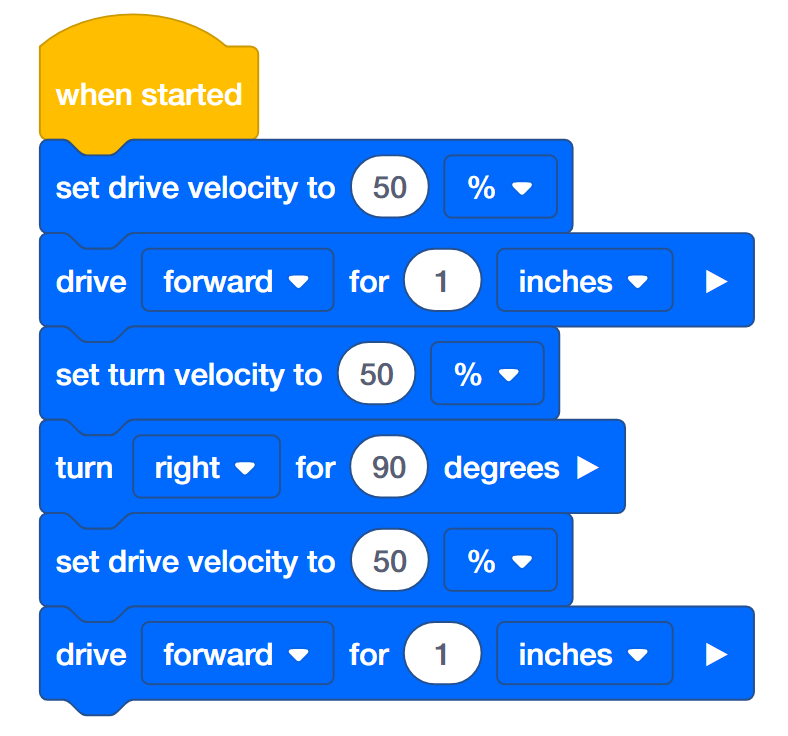
Je koning vroeg je om het kasteel te beschermen! Je moet rond het vierkante kasteel rijden om ervoor te zorgen dat het veilig is voor indringers! Programmeur, gebruik de ingestelde draaisnelheid, draai voor, stel de aandrijfsnelheid in en rijd voor blokken om de Autopilot te programmeren om in een vierkant te bewegen. De Autopilot moet snel langs de zijkanten van het plein rijden, maar langzaam op de hoeken draaien. Het onderstaande project is gestart maar onvolledig. Het heeft meer blokken en ingestelde snelheden nodig.
- Programmeur, sla het Castle-project op en download het naar de hersenen.
- Operator, voer het Castle-project uit.
- Beweegt de robot snel in een vierkante vorm maar draait langzaam op de hoeken?
- Recorder, maak aantekeningen over het gedrag van de robot.
Bonusuitdagingen:
- Laat de Touch LED van de Autopilot een andere kleur weergeven terwijl deze aan elke kant van het vierkant rijdt.
- De omtrek van het vierkante kasteel dat moet worden bewaakt is 20 inch. Programmeer de robot om rond de omtrek te bewegen.
- Het gebied van het vierkante kasteel dat moet worden bewaakt, is 49 inch. Bereken de lengte van elke zijde en beweeg in een vierkant dat het gebied bedekt.
![]() Teacher Toolbox
-
Herinneringen en oplossingen
Teacher Toolbox
-
Herinneringen en oplossingen
-
De leerkracht kan de rijafstanden beperken als de ruimte beperkt is.
-
Studenten moeten in hun groepen werken met hun individuele rollen.
-
De Bouwer moet controleren of de robot klaar is om het project uit te voeren.
-
De programmeur moet de wijzigingen aanbrengen zoals aangegeven.
-
De operator moet de projecten op de robot uitvoeren.
-
De recorder moet zijn werk en resultaten documenteren in zijn technische notitieblokken.
-
Laat de studenten inchecken wanneer ze deze activiteit hebben voltooid en hun project(en) weergeven of uitvoeren.
Klik voor de oplossingen om het kasteel te beschermen! op een van de volgende links (Google Doc/.docx/.pdf).
Robot Ober
Knoei niet met de drankjes!
-
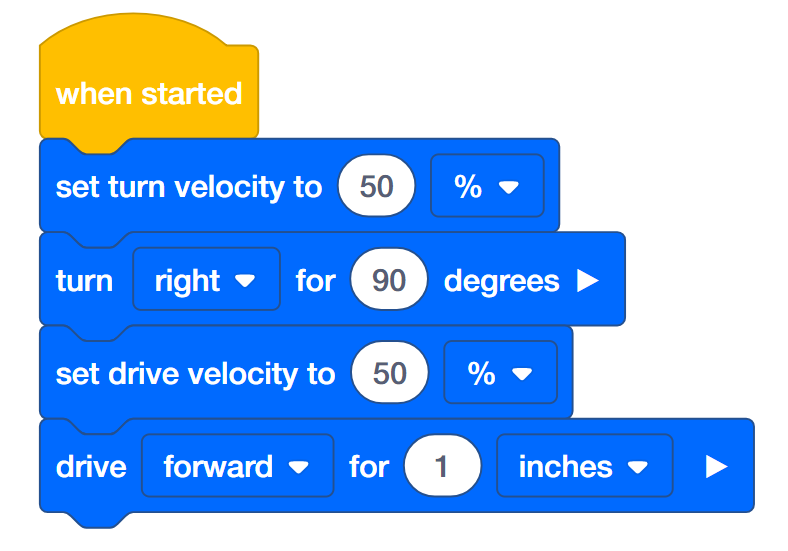
Je robot traint om ober te worden in een nieuw restaurant in de stad. Programmeer de robotkelner om snel te kunnen bewegen zonder te morsen wat hij draagt! Gebruik de 6x Pitch Standoff om eten of drinken te simuleren dat de ober zou dragen. Programmeur, gebruik de ingestelde draaisnelheid, draai voor, stel de aandrijfsnelheid in en rijd naar blokken om de Autopilot te programmeren om 360 graden te draaien en zo snel mogelijk 12 inch te rijden terwijl u een 6x Pitch Standoff op de hersenen van de Autopilot balanceert. Het onderstaande project is gestart maar onvolledig. Het moet de snelheden en afstanden hebben ingesteld.
-
Bouwer, leg een 6x Pitch Standoff van de VEX IQ Kit tegenover waar VEX IQ op de hersenen is geschreven.

- Programmeur, stel de snelheden en afstanden in. Sla vervolgens het Robot Ober-project op en download het naar de hersenen.
- Operator, voer het Robot Ober project uit.
- Draait en rijdt de robot terwijl de balk bovenop de hersenen blijft? Hoe snel kan de robot bewegen voordat de straal eraf glijdt?
- Programmeur, test sneller en sneller snelheden totdat je de limiet vindt. De limiet voor het draaien kan anders zijn dan de limiet voor het rijden. Gebruik de informatie van de recorder om beslissingen te nemen over welke snelheid de beste keuze is.
- Recorder, maak aantekeningen over het gedrag van de robot, de snelheid en of de straal eraf valt. Noteer elke keer dat het project wordt getest hoe de snelheden veranderen.
![]() Teacher Toolbox
-
Iteratief ontwerp
Teacher Toolbox
-
Iteratief ontwerp
Deze activiteit richt zich op het vragen van de studenten om deel te nemen aan een iteratief ontwerpproces. De studenten worden gevraagd om hun projecten te testen voordat ze wijzigingen aanbrengen. Stimuleer de studenten om volledig te ontwerpen, te testen, wijzigingen aan te brengen op basis van feedback en opnieuw te testen. De aanpassingen aan de snelheid moeten gebaseerd zijn op de resultaten van de tests en/of de feedback van de andere groepsleden. Moedig de leerlingen aan om het iteratieve ontwerpproces te volgen in plaats van alleen maar te raden en te controleren om tot een conclusie te komen over welke snelheid het beste is. De beste snelheid zorgt ervoor dat de robotkelner niets morst.
Iteratief ontwerp is een belangrijke ontwerpmethodologie in robotica en andere technische ontwerpprocessen.
Studenten zullen ook abstract oefenen met redeneren, terwijl ze beslissen hoe ze de snelheid aanpassen om te concluderen welke het beste is.
![]() Teacher Toolbox
-
Herinneringen en oplossingen
Teacher Toolbox
-
Herinneringen en oplossingen
- De leerkracht kan de rijafstanden beperken als de ruimte beperkt is.
- Studenten moeten in hun groepen werken met hun individuele rollen.
-
De Bouwer moet controleren of de robot klaar is om het project uit te voeren en of de 6x Pitch Standoff correct is gepositioneerd over de VEX IQ-sticker op de hersenen vóór elke test van de snelheid.

- De programmeur moet de wijzigingen aanbrengen zoals aangegeven.
- De operator moet de projecten op de robot uitvoeren.
- De recorder moet zijn werk en resultaten documenteren in zijn technische notitieblokken.
-
Laat de studenten inchecken wanneer ze deze activiteit hebben voltooid en hun project(en) weergeven of uitvoeren. Klik
voor de oplossing voor Robot Ober op een van de volgende links (Google Doc/.docx/.pdf)