
![]() 老師提示
老師提示
如果學生在建立、重新命名或儲存專案時遇到任何問題,可以參考教學。 走動並監視學生以確保他們完成所有步驟。
程式設計師應完成以下步驟:

-
開啟 檔案 選單。
-
選擇 打開範例。
-
選擇並開啟 Autopilot 模板。
-
將您的專案命名為 Velocity Remix。
-
保存 您的項目。
![]() 教師工具箱
-
行為
教師工具箱
-
行為
如前所述,行為是談論機器人行為的一種方式。 讓學生思考行為並按順序組織行動的一種方法是讓學生使用 [comment] 塊標記項目的不同部分。 學生可以標記整個專案中挑戰中的不同行為。 有關使用 [comment] 塊的更多信息,請使用 幫助。
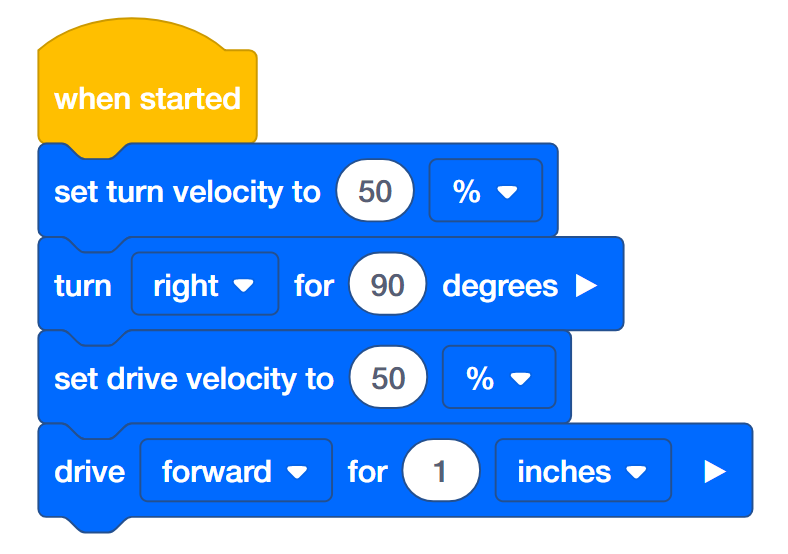
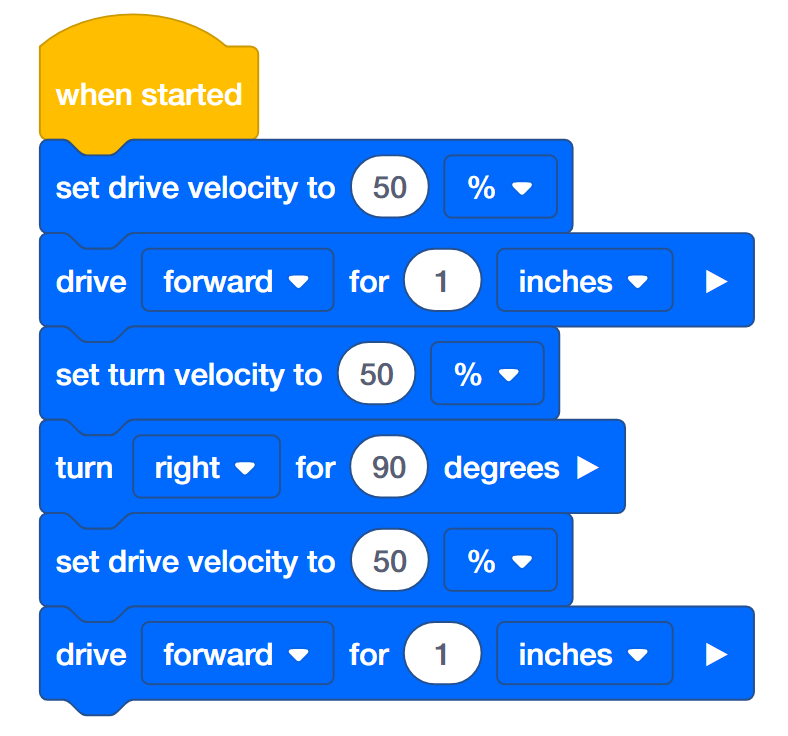
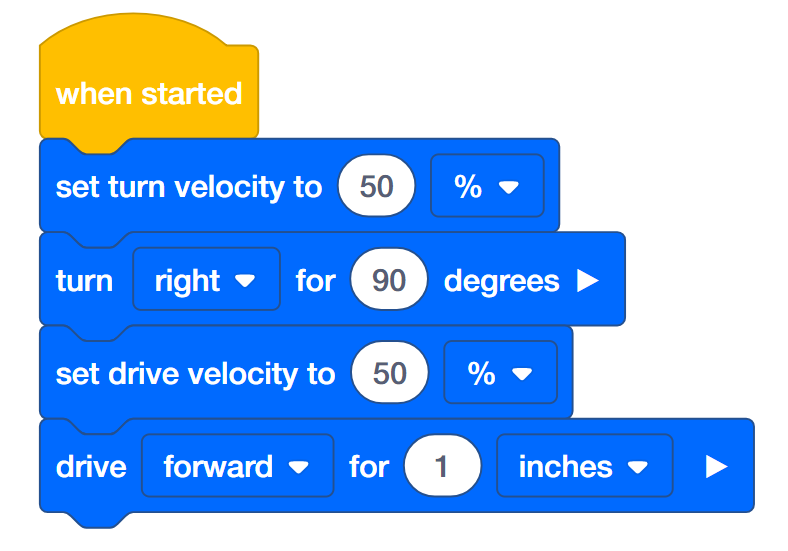
在標籤中你就是它! 在挑戰中,學生被要求對自動駕駛儀進行編程,使其快速轉彎以避免被標記,緩慢駕駛以標記某人,然後再次快速轉彎以逃脫。 請看下面使用 comment 塊來描述行為序列的範例:

您還可以要求學生根據他們想要和期望機器人的行為方式來解釋他們將如何計劃應對這些挑戰。
![]() 教師工具箱
-
提醒與解決方案
教師工具箱
-
提醒與解決方案
-
設定一個固定物體,例如一本書,機器人將對其進行標記以模仿標記人。
-
如果空間有限,老師可以限制行駛距離。
-
學生應該在小組中扮演各自的角色。
-
建造者應檢查機器人是否已準備好運行該專案。
-
程式設計師應按照指示進行更改。
-
操作員應該在機器人上運行專案。
-
記錄員應在工程筆記本中記錄他們的工作和成果。
-
讓學生在完成此活動後簽到並展示或運行他們的專案。
要取得 Tag You're It! 的解決方案,請點選 以下連結之一 (Google Doc/.docx/.pdf)。
保護城堡!
移動到一個正方形中以保護城堡免受入侵者的侵害!
-
你的國王要求你保護城堡! 您必須在方形城堡周圍行駛,以確保它免受入侵者的侵害! 程式設計師,使用 設定轉彎速度、 轉彎、 設定驅動速度和 驅動 塊來對自動駕駛儀進行編程,使其在正方形中移動。 自動駕駛儀應沿著廣場的兩側快速行駛,但在拐角處緩慢轉彎。 下面的項目已啟動但尚未完成。 它需要更多的區塊和設定的速度。
-
程式設計師,保存Castle專案並 下載 到大腦。
-
操作員, 運行 Castle 專案。
-
機器人是否在方形區域快速移動,但在角落轉彎緩慢?
-
記錄員,記錄機器人的行為。
獎金挑戰:
-
讓 Autopilot 的觸控 LED 在方形兩側行駛時顯示不同的顏色。
-
需要守衛的方形城堡的周長是20吋。 對機器人進行編程,讓它在周邊移動。
-
需要守衛的方形城堡面積為49吋。 計算每條邊的長度並在覆蓋該區域的正方形中移動。
機器人服務員
別把飲料灑了!
-
您的機器人正在接受培訓,成為鎮上新餐廳的服務員。 對機器人服務員進行編程,使其能夠快速移動而不會灑出所攜帶的東西! 使用 6x Pitch Standoff 模擬服務員攜帶的食物或飲料。 程式設計師,使用 設定轉彎速度、 轉彎、 設定驅動速度和 驅動 區塊來對自動駕駛儀進行編程,使其盡可能快地轉動360 度並行駛12 英寸,同時平衡自動駕駛儀大腦上的6 倍俯仰距。 下面的項目已啟動但尚未完成。 它需要設定速度和距離。
-
建構者,在 VEX IQ 寫在大腦上的地方放置一個 6 倍間距的 VEX IQ 套件。

-
程式設計師,設定速度和距離。 然後儲存Robot Waiter專案並 下載 到大腦。
-
操作員, 運行 Robot Waiter 專案。
-
機器人是否會在將光束保持在大腦頂部的同時轉向和駕駛? 在橫樑滑落之前,機器人可以移動多快?
-
程式設計師,測試越來越快的速度,直到找到極限。 轉彎限制可能與行駛限制不同。 使用記錄器中的資訊來決定哪種速度是最佳選擇。
-
記錄儀,記錄機器人的行為、速度、橫樑是否脫落。 記下每次測驗項目時速度如何變化。
![]() 教師工具箱
設計
教師工具箱
設計
這項活動的重點是要求學生參與迭代設計過程。 要求學生在做出更改之前測試他們的專案。 鼓勵學生充分設計、測試、根據回饋進行更改,然後再次測試。 速度的調整應基於測試結果和/或其他小組成員的回饋。 鼓勵學生遵循迭代設計過程,而不是僅僅猜測和檢查來得出最佳速度的結論。 最佳速度將確保機器人服務員不會灑出任何東西。
迭代設計是機器人技術以及其他工程設計過程中的重要設計方法。
學生還將練習抽象推理,同時決定如何調整速度以得出最佳的結論。
![]() 教師工具箱
-
提醒與解決方案
教師工具箱
-
提醒與解決方案
-
如果空間有限,老師可以限制行駛距離。
-
學生應該在小組中扮演各自的角色。
-
在每次測試速度之前,建造者應檢查機器人是否已準備好運行該項目,以及 6x Pitch Standoff 是否正確放置在大腦上的 VEX IQ 貼紙上。

-
程式設計師應按照指示進行更改。
-
操作員應該在機器人上運行專案。
-
記錄員應在工程筆記本中記錄他們的工作和成果。
-
讓學生在完成此活動後簽到並展示或運行他們的專案。
有關 Robot Waiter 的解決方案,請點擊 以下連結之一 (Google Doc/.docx/.pdf)