
अपने प्रोजेक्ट को रीमिक्स करें
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि छात्रों को किसी प्रोजेक्ट को बनाने, नाम बदलने या सहेजने में कोई समस्या हो तो वे ट्यूटोरियल्स का संदर्भ ले सकते हैं। चारों ओर घूमें और छात्रों पर नजर रखें ताकि यह सुनिश्चित हो सके कि वे सभी चरण पूरे कर रहे हैं।
प्रोग्रामर को निम्नलिखित चरण पूरे करने चाहिए:

- फ़ाइल मेनू खोलें.
- उदाहरण खोलेंचयन करें.
- ऑटोपायलट टेम्पलेटका चयन करें और खोलें।
- अपने प्रोजेक्ट का नाम वेलोसिटी रीमिक्सरखें.
- अपना प्रोजेक्ट सहेजें.
![]() शिक्षक टूलबॉक्स
-
व्यवहार
शिक्षक टूलबॉक्स
-
व्यवहार
जैसा कि पहले बताया गया है, व्यवहार रोबोट की क्रियाओं के बारे में बात करने का एक तरीका है। छात्रों को व्यवहार के बारे में सोचने और क्रियाओं को एक क्रम में व्यवस्थित करने का एक तरीका यह है कि छात्रों को [टिप्पणी] ब्लॉक का उपयोग करके अपने प्रोजेक्ट के विभिन्न भागों को लेबल करने के लिए कहा जाए। छात्र परियोजना के दौरान चुनौतियों से उत्पन्न विभिन्न व्यवहारों को चिह्नित कर सकते हैं। [टिप्पणी] ब्लॉक का उपयोग करने के बारे में अधिक जानकारी के लिए, सहायता.
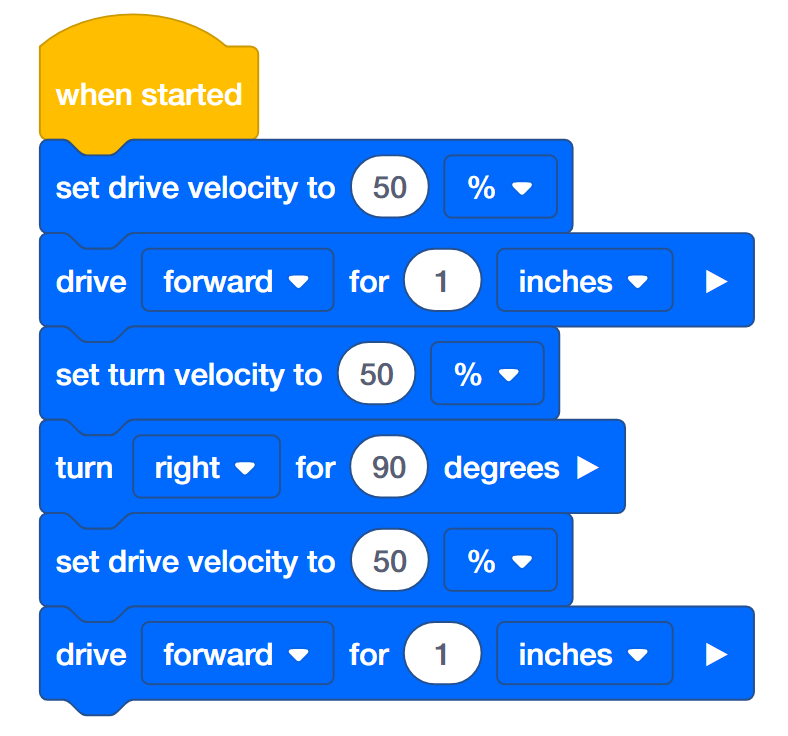
टैग में आप यह हैं! का उपयोग करें। चुनौती के लिए, छात्रों को ऑटोपायलट को प्रोग्राम करने के लिए कहा जाता है ताकि वे टैग होने से बचने के लिए तेजी से मुड़ें, किसी को टैग करने के लिए धीरे-धीरे ड्राइव करें, और फिर भागने के लिए फिर से तेजी से मुड़ें। व्यवहार के अनुक्रम का वर्णन करने के लिए टिप्पणी ब्लॉक का उपयोग करने का नीचे दिया गया उदाहरण देखें:

आप विद्यार्थियों से यह भी पूछ सकते हैं कि वे इन चुनौतियों के लिए किस प्रकार योजना बनाएंगे, तथा रोबोट से किस प्रकार का व्यवहार अपेक्षित है और वे किस प्रकार की अपेक्षा रखते हैं।
टैग, यू आर इट!
जल्दी से मुड़ें, धीरे से चलाएं, टैग का खेल खेलने के लिए जल्दी से मुड़ें!
-
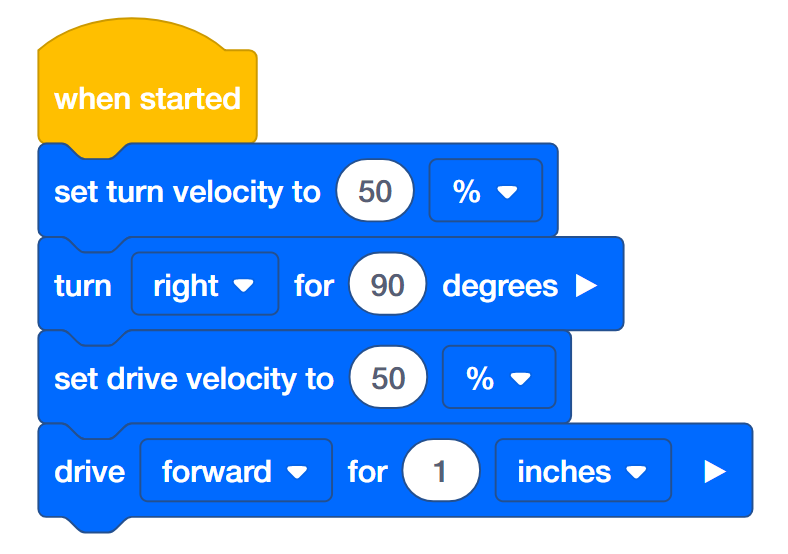
रोबोट टैग का खेल खेलना चाहता है - आप ही वह हैं! प्रोग्रामर, [सेट टर्न वेलोसिटी], [टर्न फॉर], [सेट ड्राइव वेलोसिटी], और [ड्राइव फॉर] ब्लॉक का उपयोग करके ऑटोपायलट को टैग होने से बचने के लिए तेजी से मुड़ने, किसी को टैग करने के लिए धीरे-धीरे ड्राइव करने और फिर भागने के लिए फिर से तेजी से मुड़ने के लिए प्रोग्राम करें! मोड़ने के लिए वेग प्रतिशत, ड्राइविंग के लिए वेग प्रतिशत से कम से कम दोगुना होना चाहिए। नीचे दी गई परियोजना शुरू हो चुकी है लेकिन अधूरी है। इसके लिए अधिक ब्लॉक और निर्धारित वेग की आवश्यकता होती है।
- प्रोग्रामर, टैग प्रोजेक्ट को सेव करें और डाउनलोड इसे मस्तिष्क में डालें।
- ऑपरेटर, रन द टैग परियोजना।
- क्या रोबोट तेजी से मुड़ता है, धीरे-धीरे चलता है, और फिर तेजी से मुड़ता है?
- रिकॉर्डर, रोबोट के व्यवहार के बारे में नोट्स लें।
बोनस चुनौती: किसी को टैग करने पर ऑटोपायलट को ध्वनि बजानी होगी!
![]() शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
-
एक स्थिर वस्तु जैसे कि एक पुस्तक रखें जिसे रोबोट किसी व्यक्ति को टैग करने की नकल करते हुए टैग करेगा।
-
यदि स्थान सीमित हो तो शिक्षक ड्राइव की दूरी सीमित कर सकते हैं।
-
छात्रों को अपनी-अपनी व्यक्तिगत भूमिकाओं के साथ अपने समूहों में काम करना चाहिए।
-
बिल्डर को यह जांचना चाहिए कि रोबोट परियोजना को चलाने के लिए तैयार है।
-
प्रोग्रामर को निर्देशानुसार परिवर्तन करना चाहिए।
-
ऑपरेटर को रोबोट पर परियोजनाएं चलानी चाहिए।
-
रिकॉर्डर को अपने कार्य और परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज करना चाहिए।
-
विद्यार्थियों से कहें कि जब वे यह गतिविधि पूरी कर लें तो वे जांच लें और अपनी परियोजना प्रदर्शित करें या उसे चलाएं।
टैग यू आर इट! के समाधान के लिए, निम्नलिखित लिंक में से किसी एक क्लिक करें (Google Doc/.docx/.pdf)।
महल की रक्षा करो!
महल को घुसपैठियों से बचाने के लिए एक वर्ग में आगे बढ़ें!
-
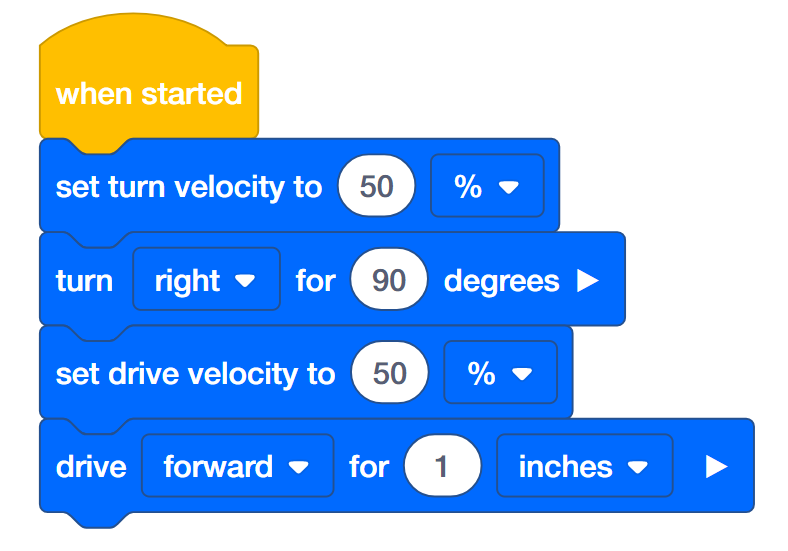
आपके राजा ने आपको महल की रक्षा करने के लिए कहा है! आपको चौकोर महल के चारों ओर ड्राइव करना होगा ताकि यह सुनिश्चित हो सके कि यह घुसपैठियों से सुरक्षित है! प्रोग्रामर, ऑटोपायलट को एक वर्ग में स्थानांतरित करने के लिए प्रोग्राम करने के लिए सेट टर्न वेलोसिटी, टर्न के लिए, सेट ड्राइव वेलोसिटी, और ब्लॉक के लिए ड्राइव का उपयोग करें। ऑटोपायलट को चौक के किनारों पर तेजी से चलना चाहिए, लेकिन कोनों पर धीरे-धीरे मुड़ना चाहिए। नीचे दी गई परियोजना शुरू हो चुकी है लेकिन अधूरी है। इसके लिए अधिक ब्लॉक और निर्धारित वेग की आवश्यकता होती है।
- प्रोग्रामर, कैसल परियोजना को सहेजें और डाउनलोड इसे मस्तिष्क में।
- ऑपरेटर, रन कैसल परियोजना.
- क्या रोबोट वर्गाकार आकार में तेजी से चलता है लेकिन कोनों पर धीरे-धीरे मुड़ता है?
- रिकॉर्डर, रोबोट के व्यवहार के बारे में नोट्स लें।
बोनस चुनौतियाँ:
- ऑटोपायलट के टच एलईडी को वर्ग के प्रत्येक तरफ ड्राइव करते समय एक अलग रंग प्रदर्शित करने दें।
- जिस वर्गाकार महल की रक्षा की जानी है उसकी परिधि 20 इंच है। रोबोट को परिधि के चारों ओर घूमने के लिए प्रोग्राम करें।
- चौकोर महल का वह क्षेत्रफल जिसकी सुरक्षा की जानी है, 49 इंच है। प्रत्येक भुजा की लंबाई की गणना करें और उस क्षेत्र को कवर करने वाले वर्ग में आगे बढ़ें।
![]() शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
-
यदि स्थान सीमित हो तो शिक्षक ड्राइव की दूरी सीमित कर सकते हैं।
-
छात्रों को अपनी-अपनी व्यक्तिगत भूमिकाओं के साथ अपने समूहों में काम करना चाहिए।
-
बिल्डर को यह जांचना चाहिए कि रोबोट परियोजना को चलाने के लिए तैयार है।
-
प्रोग्रामर को निर्देशानुसार परिवर्तन करना चाहिए।
-
ऑपरेटर को रोबोट पर परियोजनाएं चलानी चाहिए।
-
रिकॉर्डर को अपने कार्य और परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज करना चाहिए।
-
विद्यार्थियों से कहें कि जब वे यह गतिविधि पूरी कर लें तो वे जांच लें और अपनी परियोजना प्रदर्शित करें या उसे चलाएं।
महल की रक्षा के समाधान के लिए, निम्नलिखित लिंक में से एक क्लिक करें (Google Doc/.docx/.pdf)।
रोबोट वेटर
पेय पदार्थ न गिराएं!
-
आपका रोबोट शहर के एक नए रेस्तरां में वेटर बनने का प्रशिक्षण ले रहा है। रोबोट वेटर को इस तरह प्रोग्राम करें कि वह अपने सामान को गिराए बिना तेजी से आगे बढ़ सके! वेटर द्वारा ले जाए जा रहे भोजन या पेय का अनुकरण करने के लिए 6x पिच स्टैंडऑफ का उपयोग करें। प्रोग्रामर, सेट टर्न वेलोसिटी, टर्न फॉर, सेट ड्राइव वेलोसिटी, और ड्राइव फॉर ब्लॉक्स का उपयोग करके ऑटोपायलट को 360 डिग्री पर मुड़ने और 12 इंच तक ड्राइव करने के लिए प्रोग्राम करें, जबकि ऑटोपायलट के मस्तिष्क पर 6x पिच स्टैंडऑफ को संतुलित करें। नीचे दी गई परियोजना शुरू हो चुकी है लेकिन अधूरी है। इसमें वेग और दूरियां निर्धारित करने की आवश्यकता होती है।
-
बिल्डर, VEX IQ किट से 6x पिच स्टैंडऑफ को उस स्थान पर रखें जहां मस्तिष्क पर VEX IQ लिखा है।

- प्रोग्रामर, वेग और दूरी निर्धारित करें। फिर रोबोट वेटर प्रोजेक्ट को करें औरमस्तिष्क मेंकरें
- ऑपरेटर, रन रोबोट वेटर परियोजना।
- क्या रोबोट मस्तिष्क के ऊपर किरण को रखते हुए घूमता और चलाता है? बीम के फिसलने से पहले रोबोट कितनी तेजी से आगे बढ़ सकता है?
- प्रोग्रामर, जब तक आप सीमा नहीं पा लेते, तब तक तेज और तेज वेग का परीक्षण करते रहें। मोड़ने की सीमा, गाड़ी चलाने की सीमा से भिन्न हो सकती है। रिकॉर्डर से प्राप्त जानकारी का उपयोग करके निर्णय लें कि कौन सा वेग सर्वोत्तम विकल्प है।
- रिकॉर्डर, रोबोट के व्यवहार, उसकी गति, तथा बीम के गिरने के बारे में नोट्स लें। ध्यान रखें कि प्रत्येक बार परियोजना का परीक्षण करते समय वेग किस प्रकार बदल रहा है।
![]() शिक्षक टूलबॉक्स
-
पुनरावृत्तीय डिज़ाइन
शिक्षक टूलबॉक्स
-
पुनरावृत्तीय डिज़ाइन
यह गतिविधि विद्यार्थियों को पुनरावृत्तीय डिजाइन प्रक्रिया में शामिल होने के लिए कहने पर केंद्रित है। छात्रों से कहा गया है कि वे परिवर्तन करने से पहले अपनी परियोजनाओं का परीक्षण करें। विद्यार्थियों को पूर्णतः डिजाइन करने, परीक्षण करने, फीडबैक के आधार पर परिवर्तन करने तथा पुनः परीक्षण करने के लिए प्रोत्साहित करें। वेग में समायोजन परीक्षण के परिणामों और/या समूह के अन्य सदस्यों से प्राप्त फीडबैक पर आधारित होना चाहिए। विद्यार्थियों को केवल अनुमान लगाने और यह निष्कर्ष निकालने के लिए कि कौन सा वेग सर्वोत्तम है, जांच करने के बजाय पुनरावृत्तीय डिजाइन प्रक्रिया का पालन करने के लिए प्रोत्साहित करें। सर्वोत्तम वेग यह सुनिश्चित करेगा कि रोबोट वेटर कुछ भी न गिराए।
पुनरावृत्तीय डिजाइन रोबोटिक्स के साथ-साथ अन्य इंजीनियरिंग डिजाइन प्रक्रियाओं में एक महत्वपूर्ण डिजाइन पद्धति है।
छात्र अमूर्त तर्क का अभ्यास भी करेंगे, तथा यह निर्णय लेंगे कि वेग को किस प्रकार समायोजित किया जाए, ताकि यह निष्कर्ष निकाला जा सके कि कौन सा वेग सर्वोत्तम है।
![]() शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
शिक्षक टूलबॉक्स
-
अनुस्मारक और समाधान
- यदि स्थान सीमित हो तो शिक्षक ड्राइव की दूरी सीमित कर सकते हैं।
- छात्रों को अपनी-अपनी व्यक्तिगत भूमिकाओं के साथ अपने समूहों में काम करना चाहिए।
-
बिल्डर को यह जांच करनी चाहिए कि रोबोट परियोजना को चलाने के लिए तैयार है और वेग के प्रत्येक परीक्षण से पहले 6x पिच स्टैंडऑफ को मस्तिष्क पर VEX IQ डिकल के ऊपर ठीक से रखा गया है।

- प्रोग्रामर को निर्देशानुसार परिवर्तन करना चाहिए।
- ऑपरेटर को रोबोट पर परियोजनाएं चलानी चाहिए।
- रिकॉर्डर को अपने कार्य और परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज करना चाहिए।
-
जब छात्र इस गतिविधि को पूरा कर लें, तो उन्हें अपनी परियोजना प्रदर्शित करने या चलाने के लिए कहें।
रोबोट वेटर के समाधान के लिए, निम्नलिखित लिंक में से एक पर क्लिक करें (Google Doc/.docx/.pdf)