
![]() 教师提示
教师提示
如果学生在创建、重命名或保存项目时遇到任何问题,可以参考教程。 走动并监视学生以确保他们完成所有步骤。
程序员应完成以下步骤:

-
打开 文件 菜单。
-
选择 打开示例。
-
选择并打开 自动驾驶仪模板。
-
将您的项目命名为 Velocity Remix。
-
保存 您的项目。
![]() 教师工具箱
-
行为
教师工具箱
-
行为
如前所述,行为是谈论机器人行为的一种方式。 让学生思考行为并按顺序组织动作的一种方法是让学生使用 [评论] 块标记项目的不同部分。 学生可以标记整个项目中挑战中的不同行为。 有关使用 [评论] 块的更多信息,请使用 帮助.
在标签中你就是它! 在挑战中,学生们被要求对自动驾驶仪进行编程,使其快速转弯以避免被标记,缓慢驾驶以标记某人,然后再次快速转弯以逃跑。 查看下面使用 注释 块描述行为序列的示例:

您还可以要求学生根据他们想要和期望机器人的行为方式来解释他们将如何计划应对这些挑战。
![]() 教师工具箱
-
提醒和解决方案
教师工具箱
-
提醒和解决方案
-
设置一个固定物体,例如一本书,机器人将对其进行标记以模仿标记人。
-
如果空间有限,老师可以限制行驶距离。
-
学生应在小组内开展工作并承担各自的角色。
-
构建者应检查机器人是否已准备好运行该项目。
-
程序员应按照指示进行更改。
-
操作员应该在机器人上运行项目。
-
记录员应在工程笔记本中记录他们的工作和成果。
-
让学生在完成此活动后签到并展示或运行他们的项目。
要获得 Tag You're It! 的解决方案,请单击以下链接 (Google Doc/.docx/.pdf)。
保护城堡!
移动到一个正方形中以保护城堡免受入侵者的侵害!
-
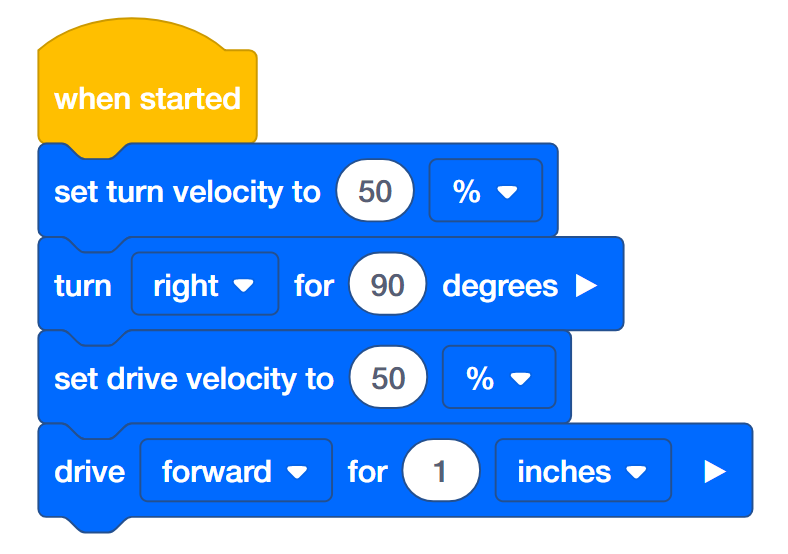
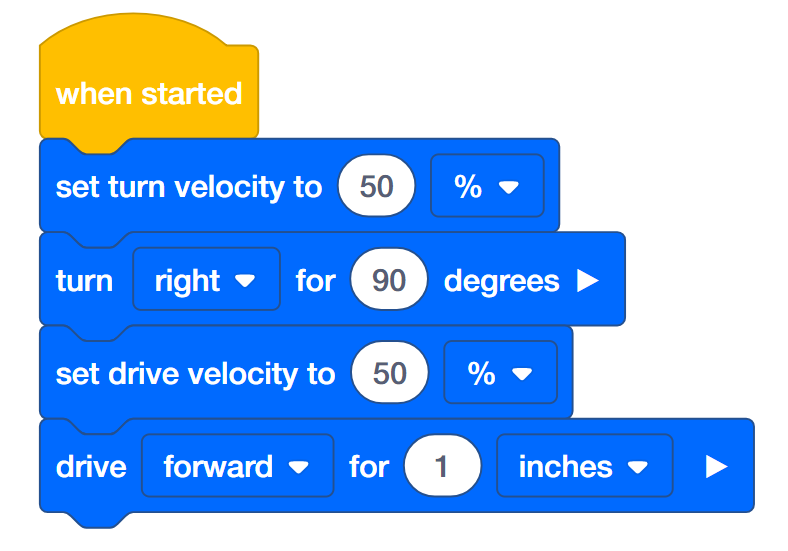
你的国王要求你保护城堡! 您必须在方形城堡周围行驶,以确保它免受入侵者的侵害! 程序员,使用 设置转弯速度、 转弯速度、 设置驱动速度和 驱动 块来对自动驾驶仪进行编程,使其在方形中移动。 自动驾驶仪应沿着广场的两侧快速行驶,但在拐角处缓慢转弯。 下面的项目已启动但尚未完成。 它需要更多的块和设定的速度。
-
程序员,保存城堡项目并 下载 到大脑。
-
操作员, 运行 Castle 项目。
-
机器人是否在方形区域快速移动,但在拐角处转弯缓慢?
-
记录员,记录机器人的行为。
奖金挑战:
-
让 Autopilot 的触摸 LED 在正方形两侧行驶时显示不同的颜色。
-
需要守卫的方形城堡的周长是20英寸。 对机器人进行编程,让它在周边移动。
-
需要守卫的方形城堡面积为49英寸。 计算每条边的长度并在覆盖该区域的正方形中移动。
![]() 教师工具箱
-
提醒和解决方案
教师工具箱
-
提醒和解决方案
-
如果空间有限,老师可以限制行驶距离。
-
学生应在小组内开展工作并承担各自的角色。
-
构建者应检查机器人是否已准备好运行该项目。
-
程序员应按照指示进行更改。
-
操作员应该在机器人上运行项目。
-
记录员应在工程笔记本中记录他们的工作和成果。
-
让学生在完成此活动后签到并展示或运行他们的项目。
要获得“保护城堡!”的解决方案,请单击以下链接 (Google Doc/.docx/.pdf)。
机器人服务员
别把饮料洒了!
-
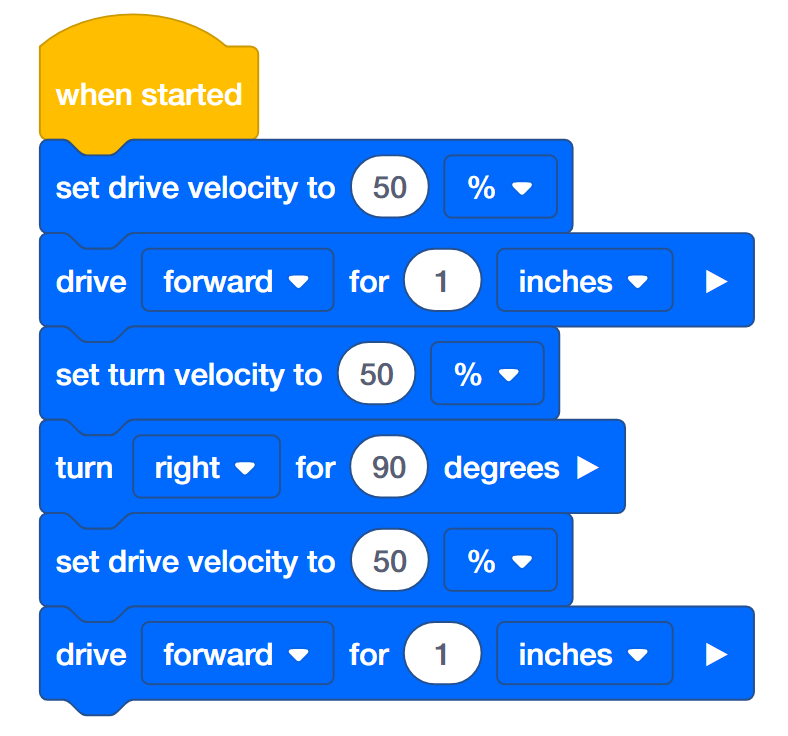
您的机器人正在接受培训,成为镇上一家新餐厅的服务员。 对机器人服务员进行编程,使其能够快速移动而不会洒出所携带的东西! 使用 6x Pitch Standoff 模拟服务员携带的食物或饮料。 程序员,使用 设置转弯速度、 转弯、 设置驱动速度和 驱动 块对自动驾驶仪进行编程,使其尽快转弯 360 度并行驶 12 英寸,同时平衡自动驾驶仪大脑上的 6 倍俯仰距离。 下面的项目已启动但尚未完成。 它需要设置速度和距离。
-
构建者,在 VEX IQ 写在大脑上的地方放置一个 6 倍间距的 VEX IQ 套件。

-
程序员,设置速度和距离。 然后保存机器人服务员项目并将其 下载 到大脑。
-
操作员, 运行 机器人服务员项目。
-
机器人是否会在将光束保持在大脑顶部的同时进行转向和驾驶? 在横梁滑落之前,机器人可以移动多快?
-
程序员,测试越来越快的速度,直到找到极限。 转弯限制可能与行驶限制不同。 使用记录器中的信息来决定哪种速度是最佳选择。
-
记录仪,记录机器人的行为、速度以及横梁是否脱落。 记下每次测试项目时速度如何变化。
![]() 教师工具箱
-
迭代设计
教师工具箱
-
迭代设计
这项活动的重点是要求学生参与迭代设计过程。 要求学生在做出更改之前测试他们的项目。 鼓励学生充分设计、测试、根据反馈进行更改,然后再次测试。 对速度的调整应基于测试结果和/或其他小组成员的反馈。 鼓励学生遵循迭代设计过程,而不是仅仅猜测和检查来得出最佳速度的结论。 最佳速度将确保机器人服务员不会洒出任何东西。0
设计是机器人以及其他工程设计过程中的重要设计方法。
学生还将练习抽象推理,同时决定如何调整速度以得出最好的结论。
![]() 教师工具箱
-
提醒和解决方案
教师工具箱
-
提醒和解决方案
-
如果空间有限,老师可以限制行驶距离。
-
学生应在小组内开展工作并承担各自的角色。
-
在每次测试速度之前,构建者应检查机器人是否已准备好运行该项目,以及 6x Pitch Standoff 是否正确放置在大脑上的 VEX IQ 贴花上。

-
程序员应按照指示进行更改。
-
操作员应该在机器人上运行项目。
-
记录员应在工程笔记本中记录他们的工作和成果。
-
让学生在完成此活动后签到并展示或运行他们的项目。
有关机器人服务员的解决方案,请单击以下链接 (Google Doc/.docx/.pdf)