
Remixare il tuo progetto
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
Gli studenti possono fare riferimento alle esercitazioni se hanno problemi a creare, rinominare o salvare un progetto. Cammina e monitora gli studenti per assicurarti che completino tutti i passaggi.
Il Programmatore deve completare i seguenti passaggi:

- Aprire il menu File.
- Seleziona Apri esempi.
- Seleziona e apri il modello di pilota automatico.
- Dai un nome al tuo progetto Velocity Remix.
- Salva il tuo progetto.
![]() Cassetta degli attrezzi per insegnanti
-
Comportamenti
Cassetta degli attrezzi per insegnanti
-
Comportamenti
Come accennato in precedenza, i comportamenti sono un modo per parlare delle azioni del
robot. Un modo per far sì che gli studenti riflettano sui comportamenti e organizzino le
azioni in una sequenza, è quello di fare in modo che gli studenti etichettino diverse
parti del loro progetto utilizzando il blocco [comment]. Gli studenti possono
etichettare i diversi comportamenti dalle sfide durante il progetto. Per ulteriori
informazioni sull'utilizzo del blocco [comment], utilizza la Guida.
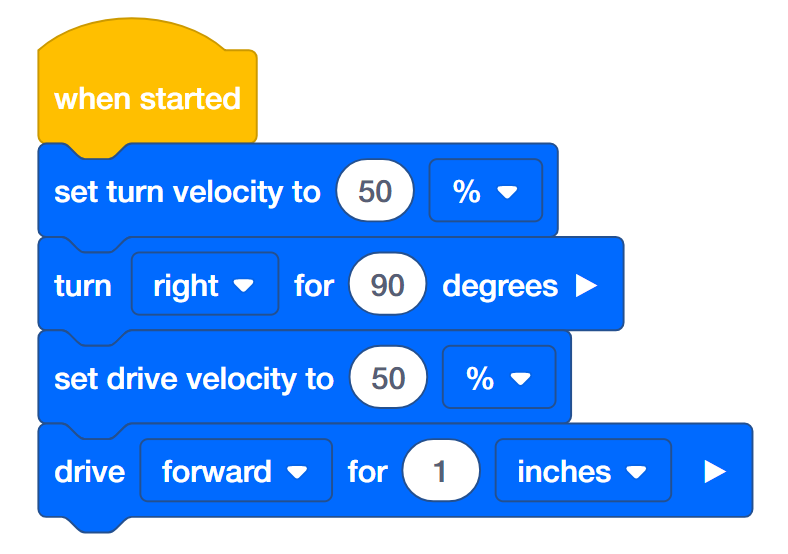
Nel tag You' re It! sfida, agli studenti viene
chiesto di programmare l'Autopilota per girare rapidamente per evitare di essere
taggati, guidare lentamente per taggare qualcuno e poi girare di nuovo rapidamente per
scappare. Visualizza l'esempio seguente di utilizzo
del blocco commenti per descrivere la sequenza di comportamenti:

Puoi anche chiedere agli studenti di spiegare come pianificheranno queste sfide in termini di come vogliono e si aspettano che il robot si comporti.
Tag You' re It!
Gira velocemente, guida lentamente, gira velocemente per giocare una partita a tag!
-
Il robot vuole fare un gioco di tag:sei tu! Programmatore, usa i blocchi [set turn velocity], [turn for], [set drive velocity] e [drive for] per programmare il pilota automatico a girare rapidamente per evitare di essere taggato, guida lentamente per taggare qualcuno e poi gira di nuovo rapidamente per scappare! La percentuale di velocità per la sterzata dovrebbe essere almeno il doppio della percentuale di velocità per la guida. Il progetto seguente è iniziato ma incompleto. Ha bisogno di più blocchi e di velocità impostate.
- Programmatore, salva il progetto Tag e scaricalo nel cervello.
- Operatore, esegui il progetto Tag.
- Il robot gira rapidamente, guida lentamente e poi gira di nuovo rapidamente?
- Registratore, prendi appunti sul comportamento del robot.
Sfida bonus: fai in modo che il pilota automatico riproduca un suono una volta che tagga qualcuno!
![]() Teacher Toolbox
-
Promemoria e soluzioni
Teacher Toolbox
-
Promemoria e soluzioni
-
Imposta un oggetto fisso come un libro che il robot taggerà per imitare il tagging di una persona.
-
L'insegnante può limitare le distanze di guida se lo spazio è limitato.
-
Gli studenti dovrebbero lavorare nei loro gruppi con i loro ruoli individuali.
-
Il Costruttore deve verificare che il robot sia pronto a eseguire il progetto.
-
Il programmatore deve apportare le modifiche come indicato.
-
L'operatore dovrebbe eseguire i progetti sul robot.
-
Il Registratore dovrebbe documentare il proprio lavoro e i risultati nei propri quaderni di ingegneria.
-
Chiedi agli studenti di effettuare il check-in quando hanno completato questa attività e di visualizzare o eseguire i loro progetti.
Per la soluzione a Tag You' re It!, clicca su uno dei seguenti link (Google Doc/.docx/.pdf).
Proteggi il Castello!
Spostati in una piazza per proteggere il castello dagli intrusi!
-
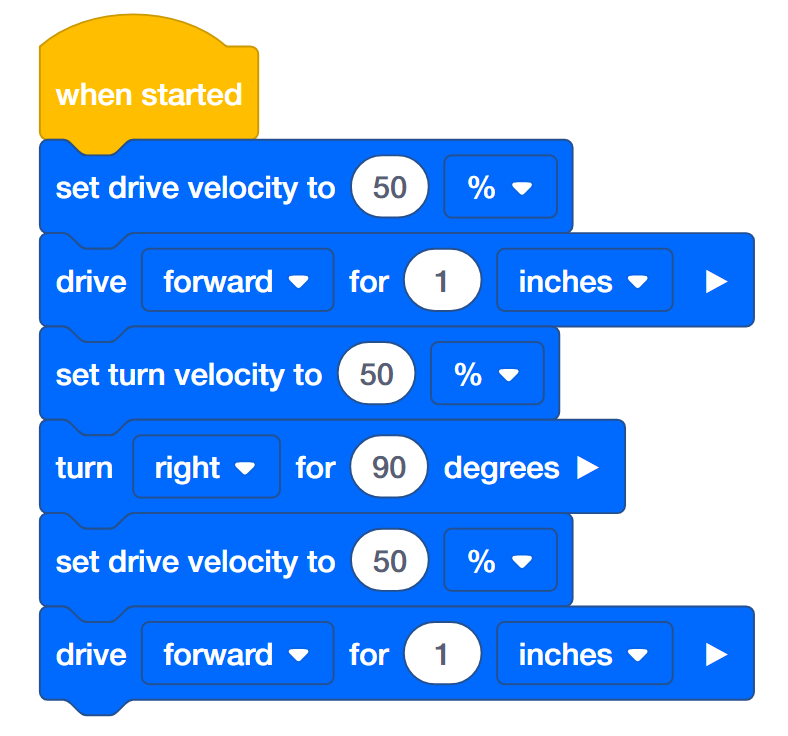
Il tuo re ti ha chiesto di proteggere il castello! Devi guidare intorno al castello quadrato per assicurarti che sia al sicuro dagli intrusi! Programmatore, utilizzare la velocità di rotazione impostata, girare per, impostare la velocità di guida e guidare per i blocchi per programmare il pilota automatico per muoversi in un quadrato. L'autopilota dovrebbe guidare rapidamente lungo i lati della piazza, ma girare lentamente agli angoli. Il progetto seguente è iniziato ma incompleto. Ha bisogno di più blocchi e di velocità impostate.
- Programmatore, salva il progetto del Castello e scaricalo nel cervello.
- Operatore, gestisci il progetto del Castello.
- Il robot si muove rapidamente in forma quadrata ma gira lentamente agli angoli?
- Registratore, prendi appunti sul comportamento del robot.
Sfide bonus:
- Fare in modo che il LED Touch dell'Autopilota visualizzi un colore diverso mentre guida su ciascun lato della piazza.
- Il perimetro del castello quadrato che deve essere sorvegliato è di 50 cm. Programmare il robot per muoversi lungo il perimetro.
- L'area del castello quadrato che deve essere sorvegliata è di 49 pollici. Calcola la lunghezza di ciascun lato e muoviti in un quadrato che copra l'area.
![]() Teacher Toolbox
-
Promemoria e soluzioni
Teacher Toolbox
-
Promemoria e soluzioni
-
L'insegnante può limitare le distanze di guida se lo spazio è limitato.
-
Gli studenti dovrebbero lavorare nei loro gruppi con i loro ruoli individuali.
-
Il Costruttore deve verificare che il robot sia pronto a eseguire il progetto.
-
Il programmatore deve apportare le modifiche come indicato.
-
L'operatore dovrebbe eseguire i progetti sul robot.
-
Il Registratore dovrebbe documentare il proprio lavoro e i risultati nei propri quaderni di ingegneria.
-
Chiedi agli studenti di effettuare il check-in quando hanno completato questa attività e di visualizzare o eseguire i loro progetti.
Per le soluzioni per Proteggere il Castello!, clicca su uno dei seguenti link (Google Doc/.docx/.pdf).
Robot Cameriere
Non versare le bevande!
-
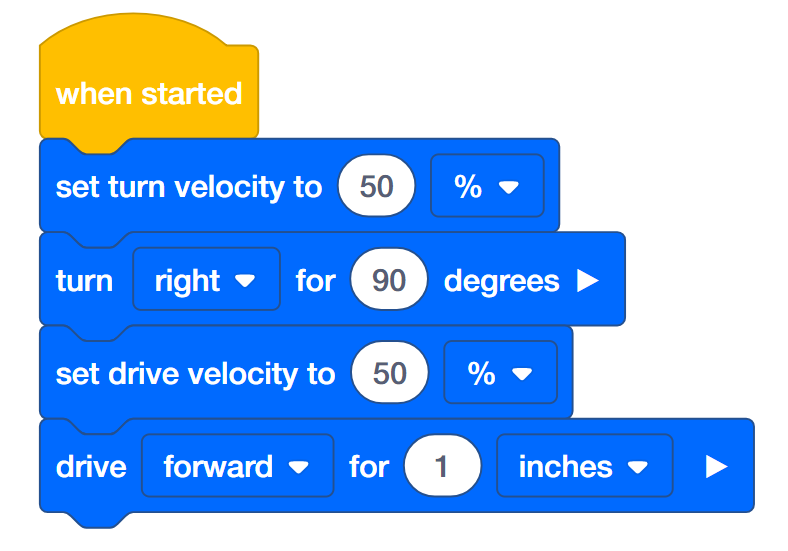
Il tuo robot si sta allenando per fare il cameriere in un nuovo ristorante in città. Programmare il robot cameriere per potersi muovere velocemente senza rovesciare quello che trasporta! Usa il 6x Pitch Standoff per simulare cibo o bevande che il cameriere porterebbe con sé. Programmatore, usa la velocità di virata impostata, gira per, imposta la velocità di guida e guida per i blocchi per programmare il pilota automatico per girare di 360 gradi e guidare di 12 pollici il più rapidamente possibile, bilanciando 6x Pitch Standoff sul cervello del pilota automatico. Il progetto seguente è iniziato ma incompleto. Deve avere le velocità e le distanze impostate.
-
Costruttore, posiziona un 6x Pitch Standoff dal kit VEX IQ dove VEX IQ è scritto sul cervello.

- Programmatore, impostare le velocità e le distanze. Quindi salva il progetto Robot Cameriere e scaricalo nel cervello.
- Operatore, eseguire il progetto Robot Cameriere.
- Il robot gira e guida mantenendo il raggio sopra il cervello? Quanto velocemente può muoversi il robot prima che la trave scivoli via?
- Programmatore, prova velocità sempre più veloci fino a trovare il limite. Il limite per la sterzata potrebbe essere diverso dal limite per la guida. Utilizza le informazioni del Registratore per prendere decisioni su quale velocità sia la scelta migliore.
- Registratore, prendi appunti sul comportamento del robot, sulla sua velocità e se il raggio cade. Prendere nota di come le velocità cambiano ogni volta che il progetto viene testato.
![]() Teacher Toolbox
-
Iterative Design
Teacher Toolbox
-
Iterative Design
Questa attività si concentra sul chiedere agli studenti di impegnarsi in un processo di
progettazione iterativa. Gli studenti sono invitati a testare i loro progetti prima di
apportare modifiche. Incoraggia gli studenti a progettare, testare, apportare modifiche
in base al feedback e ripetere il test. Le regolazioni della velocità dovrebbero essere
basate sui risultati dei test e/o sul feedback degli altri membri del gruppo. Incoraggia
gli studenti a seguire il processo di progettazione iterativa invece di limitarsi a
indovinare e controllare per giungere a una conclusione su quale velocità sia la
migliore. La migliore velocità garantirà che il cameriere robot non versi nulla. La
progettazione
iterativa è un'importante metodologia di progettazione in robotica e in altri processi
di progettazione ingegneristica.
Gli studenti praticheranno anche il ragionamento astratto mentre decidono come regolare la velocità per concludere quale sia la migliore.
![]() Teacher Toolbox
-
Promemoria e soluzioni
Teacher Toolbox
-
Promemoria e soluzioni
- L'insegnante può limitare le distanze di guida se lo spazio è limitato.
- Gli studenti dovrebbero lavorare nei loro gruppi con i loro ruoli individuali.
-
Il Costruttore deve verificare che il robot sia pronto a eseguire il progetto e che il 6x Pitch Standoff sia posizionato correttamente sulla decalcomania VEX IQ sul cervello prima di ogni test della velocità.

- Il programmatore deve apportare le modifiche come indicato.
- L'operatore dovrebbe eseguire i progetti sul robot.
- Il Registratore dovrebbe documentare il proprio lavoro e i risultati nei propri quaderni di ingegneria.
-
Chiedi agli studenti di effettuare il check-in quando hanno completato questa attività e
di visualizzare o eseguire i loro progetti.
Per la soluzione al Robot Cameriere,
clicca su uno dei seguenti link (Google
Doc/.docx/.pdf)