
नियंत्रक अन्वेषण - भाग 1
![]() शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
- यह अन्वेषण छात्रों को क्लॉबोट व्यवहारों से परिचित कराएगा जिन्हें नियंत्रक के साथ संचालित करने के लिए प्रोग्राम किया जा सकता है:
- क्लॉबोट विद कंट्रोलर टेम्पलेट का उपयोग करने से छात्रों को कंट्रोलर का उपयोग करके क्लॉबोट को नियंत्रित करने में सक्षम बनाता है। VEXcode IQ में चार अलग-अलग ब्लॉक उपलब्ध हैं, जिनका उपयोग क्लॉबोट की मोटरों को नियंत्रित करने के लिए किया जा सकता है। छात्रों को क्लॉबोट के प्रत्येक मोटर के वेग को नियंत्रित करने और नियंत्रक को मोटर कार्यों को नियंत्रित करने में सक्षम बनाने के लिए [मोटर वेग सेट करें], [स्पिन], और (नियंत्रक की स्थिति) ब्लॉक में मापदंडों को समायोजित करने की आवश्यकता होगी।
-
नियंत्रक प्रोग्रामिंग के बारे में अधिक जानकारी के लिए, नीचे पर क्लिक करें।
- संपूर्ण कक्षा गतिविधि के रूप में, छात्रों के साथ प्रोग्रामिंग ब्लॉकों की समीक्षा करें। छात्रों को बताएं कि VEXcode IQ में चार अलग-अलग ब्लॉक उपलब्ध हैं, जिनका उपयोग क्लॉबोट की मोटरों को नियंत्रित करने के लिए किया जा सकता है। छात्रों को क्लॉबोट के प्रत्येक मोटर के वेग को नियंत्रित करने और नियंत्रक को मोटर कार्यों को नियंत्रित करने में सक्षम बनाने के लिए [मोटर वेग सेट करें], [स्पिन], और (नियंत्रक की स्थिति) ब्लॉक में मापदंडों को समायोजित करने की आवश्यकता होगी।
क्लॉबोट नियंत्रक के साथ प्रोग्रामिंग के लिए तैयार है! यह अन्वेषण आपको एक परियोजना के भीतर कुछ बुनियादी आंदोलनों को प्रोग्राम करने में सक्षम होने के लिए उपकरण देगा।
VEXcode IQ जो इस अन्वेषण में उपयोग किया जाएगा:
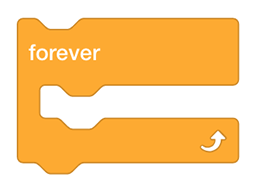
- [हमेशा के लिए] ब्लॉक - यह ब्लॉक ब्लॉकों के एक सेट को हमेशा के लिए लूप करता है। [फॉरएवर] लूप से केवल ब्रेक ब्लॉक का उपयोग करके या प्रोग्राम को रोककर ही बाहर निकला जा सकता है। [फॉरएवर] ब्लॉक तब तक दोहराना बंद नहीं करेगा जब तक कि उसके अंदर ब्रेक ब्लॉक नहीं रखा जाता।
- यहां [Forever] लूप से बाहर निकलने के लिए [Break] ब्लॉक का उपयोग किए जाने का एक उदाहरण दिया गया है।
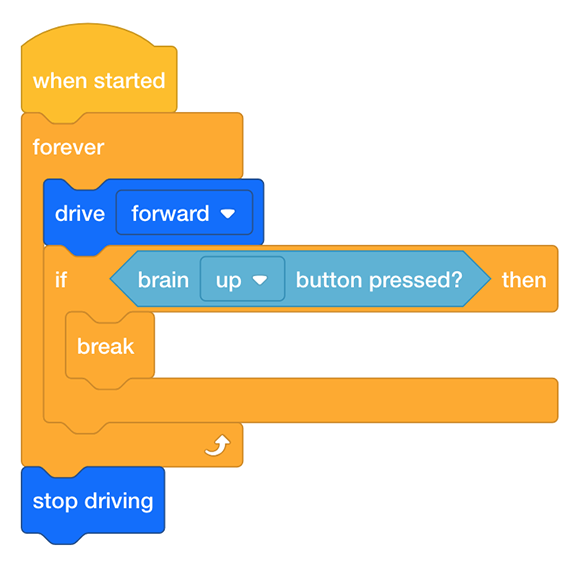
- यहां [Forever] लूप से बाहर निकलने के लिए [Break] ब्लॉक का उपयोग किए जाने का एक उदाहरण दिया गया है।
- [मोटर वेग सेट करें] ब्लॉक मोटर की गति निर्धारित करता है।

- वेग को प्रतिशत या आरपीएम पर सेट किया जा सकता है:
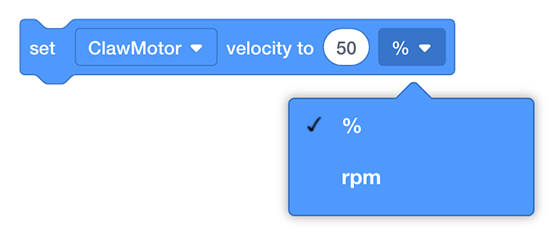
- वेग को प्रतिशत या आरपीएम पर सेट किया जा सकता है:
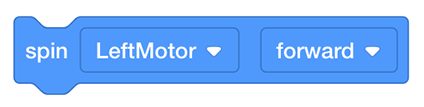
- [स्पिन] ब्लॉक मोटर को तब तक घुमाता है जब तक वह रुक न जाए। कार्यक्रम को रोककर मोटर को बंद किया जाएगा।
- (नियंत्रक की स्थिति) ब्लॉक नियंत्रक पर जॉयस्टिक की स्थिति को अक्ष के साथ रिपोर्ट करता है। जॉयस्टिक अक्ष पर केन्द्रित होने पर 0 हो जाता है।
- यह ब्लॉक नियंत्रक को मोटर के वेग का निर्धारण करने में सक्षम करेगा। ऐसा करने के लिए, इस ब्लॉक को टूलबॉक्स से [मोटर वेग निर्धारित करें] ब्लॉक में वेग पर खींचें; यह डिफ़ॉल्ट वेग को आपके द्वारा चुनी गई नियंत्रक स्थिति से बदल देगा।
इनमें से किसी भी ब्लॉक के बारे में अधिक जानकारी प्राप्त करने के लिए, सहायता खोलें, और उस ब्लॉक का चयन करें जिसके बारे में आपके प्रश्न हैं।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
- यदि यह छात्रों के लिए VEXcode IQ का उपयोग करने का पहला अवसर है, तो वे इस अन्वेषण के दौरान किसी भी समय ट्यूटोरियल का संदर्भ ले सकते हैं। ट्यूटोरियल्स टूलबार में स्थित हैं।

- सुनिश्चित करें कि प्रत्येक छात्र समूह के पास सभी आवश्यक सामग्री उपलब्ध हो
प्रत्येक समूह के बिल्डर को आवश्यक हार्डवेयर मिलना चाहिए। रिकॉर्डर को समूह की इंजीनियरिंग नोटबुक मिलनी चाहिए। प्रोग्रामर को VEXcode IQ खोलना चाहिए।
| मात्रा | आवश्यक सामग्री |
|---|---|
| 1 |
क्लॉबोट |
| 1 |
चार्ज की गई VEX IQ रोबोट बैटरी |
| 1 |
VEX IQ रेडियो |
| 1 |
नियंत्रक |
| 1 |
टेदर केबल |
| 1 |
VEXcode IQ |
| 1 |
यूएसबी केबल (यदि कंप्यूटर का उपयोग कर रहे हैं) |
| 1 |
इंजीनियरिंग नोटबुक |