
Competere
Ora che hai creato e testato un progetto per rilevare e spingere un cubo fuori dal campo, sei pronto per la sfida Cube Crasher.
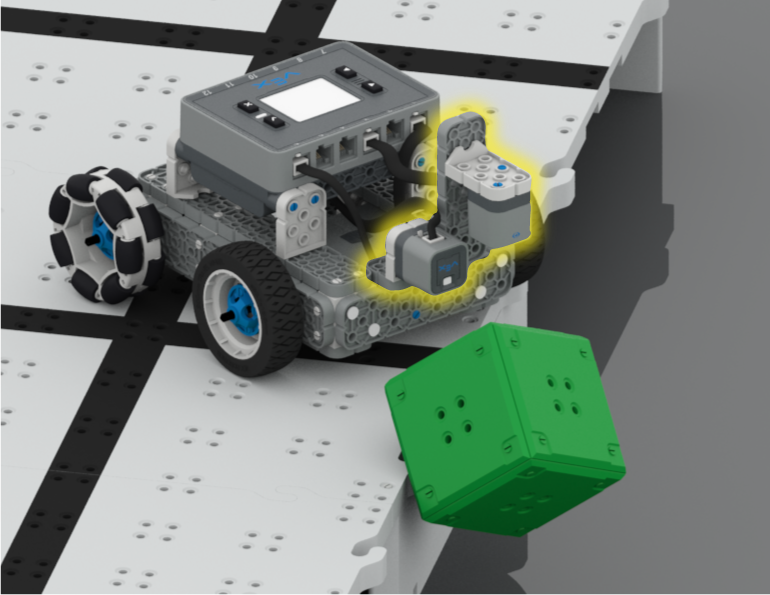
L'obiettivo di questa sfida è spingere tutti e quattro i cubi fuori dal campo nel minor tempo possibile. L'animazione seguente mostra un esempio di come allestire il campo e iniziare la competizione. Vedrai il robot rilevare e spingere via il primo cubo, quindi muoversi per rilevare il cubo successivo. L'animazione mostrerà quindi la fine della prova a tempo mentre il quarto cubo viene spinto fuori dal campo!
Segui i passaggi in questo documento per completare la sfida Cube Crasher Google / .docx / .pdf
Una volta completata la Cube Crasher Challenge, contatta il tuo insegnante. Assicurati di aver documentato i risultati della sfida nel tuo quaderno di progettazione.
Conclusione Riflessione
Ora che hai creato una strategia e hai partecipato alla Cube Crasher Challenge, è il momento di riflettere su ciò che hai imparato e fatto in questa lezione. Inizia una nuova pagina del tuo quaderno di ingegneria per iniziare la tua riflessione.
Valuta te stesso come principiante, apprendista o esperto per ciascuno dei seguenti concetti nel tuo quaderno di ingegneria. Fornisci una breve spiegazione del motivo per cui hai assegnato quella valutazione a ciascun concetto:
- Aggiungere il sensore di distanza al BaseBot e utilizzarlo in un progetto VEXcode IQ per rilevare un cubo
- Costruire e ripetere un progetto per far sì che il tuo robot rilevi e sposti i cubi fuori dal campo
- Collaborare con i membri del mio team per creare un progetto VEXcode IQ che supporti la nostra strategia di gioco
Utilizza questa tabella per aiutarti a determinare in quale categoria rientri.
| Esperto | Ritengo di aver compreso appieno il concetto e di poterlo insegnare a qualcun altro. |
| Apprendista | Ritengo di aver compreso il concetto a sufficienza per poter partecipare alla sfida. |
| Novizio | Ho la sensazione di non aver capito il concetto e di non sapere come portare a termine la sfida. |
Cosa succederà ora?
In questa lezione hai imparato a conoscere il sensore di distanza e come può essere utilizzato su un robot per rilevare oggetti. Hai anche imparato come utilizzare un blocco [Aspetta fino a] in un progetto con feedback del sensore. Hai creato e ripetuto il tuo progetto VEXcode IQ per rilevare e spostare i cubi dal campo e hai partecipato alla Cube Crasher Challenge.
Nella prossima lezione imparerai:
- Scopri di più sul sensore ottico e su come può essere utilizzato in un progetto
- Scopri cos'è un algoritmo e come può essere utilizzato
- Partecipa alla sfida della Lezione 4

Seleziona < Torna alle lezioni per tornare alla panoramica della lezione.
Seleziona Lezione successiva > per continuare alla Lezione 4 e scoprire di più sul sensore ottico e sugli algoritmi.