
Competir
Agora que já construiu e testou um projeto para detetar e empurrar um cubo para fora do campo, está pronto para o Cube Crasher Challenge.
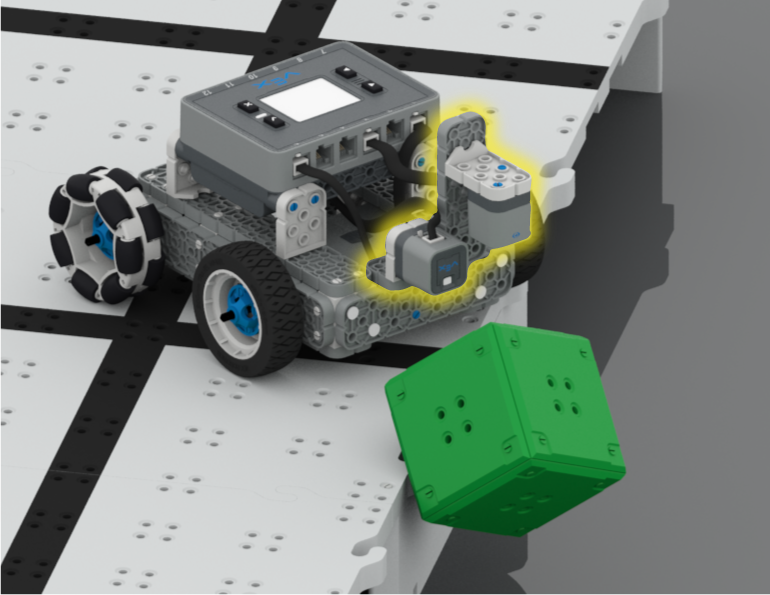
O objetivo deste desafio é empurrar todos os quatro cubos para fora do campo no menor tempo possível. A animação abaixo mostra um exemplo de como montar o Campo e iniciar a competição. Verá o robô detetar e empurrar o primeiro cubo e, em seguida, mover-se para detetar o próximo cubo. A animação mostrará então o final do teste cronometrado quando o quarto cubo for empurrado para fora do campo!
Siga os passos deste documento para completar o Cube Crasher Challenge Google
Depois de completares o Cube Crasher Challenge, fala com o teu professor. Certifique-se de que documentou os resultados do desafio no seu caderno de engenharia.
Conclusão da reflexão
Agora que já criou uma estratégia e competiu no Cube Crasher Challenge, está na altura de refletir sobre o que aprendeu e fez nesta lição. Comece uma nova página no seu caderno de engenharia para iniciar a sua reflexão.
Avalie-se como novato, aprendiz ou especialista em cada um dos seguintes conceitos no seu caderno de engenharia. Apresente uma breve explicação de por que razão atribuiu esta classificação a cada conceito:
- Adicionar o sensor de distância ao seu BaseBot e utilizá-lo num projeto VEXcode IQ para detetar um cubo
- Construir e iterar um projeto para fazer com que o seu robô detete e mova cubos para fora do campo
- Colaborar com os membros da minha equipa para construir um projeto VEXcode IQ que apoie a nossa estratégia de jogo
Utilize esta tabela para o ajudar a determinar em que categoria se enquadra.
| Especialista | Sinto que compreendi perfeitamente o conceito e poderia ensiná-lo a outra pessoa. |
| Aprendiz | Sinto que compreendi o conceito o suficiente para competir no desafio. |
| Novato | Sinto que não percebi o conceito e não sei como completar o desafio. |
O que vem a seguir?
Nesta lição, aprendeu sobre o sensor de distância e como pode ser utilizado num robô para detetar objetos. Aprendeu também como utilizar um bloco [Wait Until] num projeto com feedback de sensor. Construiu e iterou o seu projeto VEXcode IQ para detetar e mover cubos para fora do campo e competiu no Cube Crasher Challenge.
Na próxima lição irá:
- Conheça o Sensor Óptico e como pode ser utilizado num projeto
- Saiba o que é um algoritmo e como pode ser utilizado
- Competir no Desafio da Lição 4
Selecione < Regressar às Lições para voltar à Visão Geral da Lição.
Selecione Próxima Lição > para continuar na Lição 4 e aprender sobre o Sensor Óptico e os algoritmos.