
Concurrence
Maintenant que vous avez construit et testé un projet pour détecter et pousser un cube hors du terrain, vous êtes prêt pour le Cube Crasher Challenge.
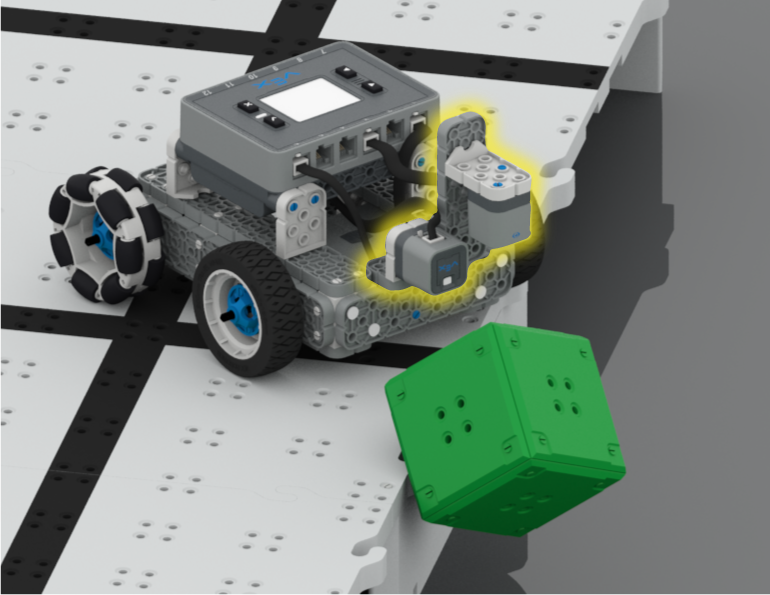
Le but de ce défi est de pousser les quatre cubes hors du terrain dans les meilleurs délais. L'animation ci-dessous montre un exemple de la façon de configurer le champ et de commencer la compétition. Vous verrez le robot détecter et pousser le premier cube, puis se déplacer pour détecter le cube suivant. L'animation montrera ensuite la fin de l'essai chronométré lorsque le quatrième cube sera poussé hors du terrain !
Suivez les étapes de ce document pour terminer le Cube Crasher Challenge Google / .docx / .pdf
Une fois que vous avez terminé le défi Cube Crasher, vérifiez auprès de votre professeur. Assurez-vous d'avoir documenté les résultats du défi dans votre cahier d'ingénierie.
Réflexion finale
Maintenant que vous avez créé une stratégie et participé au Cube Crasher Challenge, il est temps de réfléchir à ce que vous avez appris et fait dans cette leçon. Commencez une nouvelle page dans votre cahier d'ingénierie pour commencer votre réflexion.
Évaluez-vous en tant que novice, apprenti ou expert sur chacun des concepts suivants dans votre cahier d'ingénierie. Expliquez brièvement pourquoi vous vous êtes attribué cette note pour chaque concept :
- Ajouter le capteur de distance à votre BaseBot et l'utiliser dans un projet VEXcode IQ pour détecter un cube
- Construire et itérer sur un projet pour que votre robot détecte et déplace les cubes hors du terrain
- Collaborer avec les membres de mon équipe pour construire un projet VEXcode IQ qui soutient notre stratégie de jeu
Utilisez ce tableau pour vous aider à déterminer à quelle catégorie vous appartenez.
| Expert | J'ai l'impression que j'ai bien compris le concept et que je pourrais l'enseigner à quelqu'un d'autre. |
| Apprenti | J'ai l'impression d'avoir suffisamment compris le concept pour relever le défi. |
| Novice | Je sens que je n'ai pas compris le concept et que je ne sais pas comment relever le défi. |
Et ensuite ?
Dans cette leçon, vous avez appris à propos du capteur de distance et comment il peut être utilisé sur un robot pour détecter des objets. Vous avez également appris à utiliser un bloc [Attendre] dans un projet avec des retours de capteur. Vous avez construit et itéré sur votre projet VEXcode IQ pour détecter et déplacer des cubes hors du terrain, et vous avez participé au Cube Crasher Challenge.
Dans la prochaine leçon, vous allez :
- En savoir plus sur le capteur optique et sur la façon dont il peut être utilisé dans un projet
- Découvrez ce qu'est un algorithme et comment il peut être utilisé
- Participez au défi de la leçon 4
Sélectionnez < Retour aux leçons pour revenir à l'aperçu de la leçon.
Sélectionnez Prochaine leçon > pour passer à la leçon 4 et en apprendre davantage sur le capteur optique et les algorithmes.