
Konkurować
Teraz, gdy zbudowałeś i przetestowałeś projekt mający na celu wykrycie i wypchnięcie kostki z pola, jesteś gotowy na wyzwanie Cube Crasher.
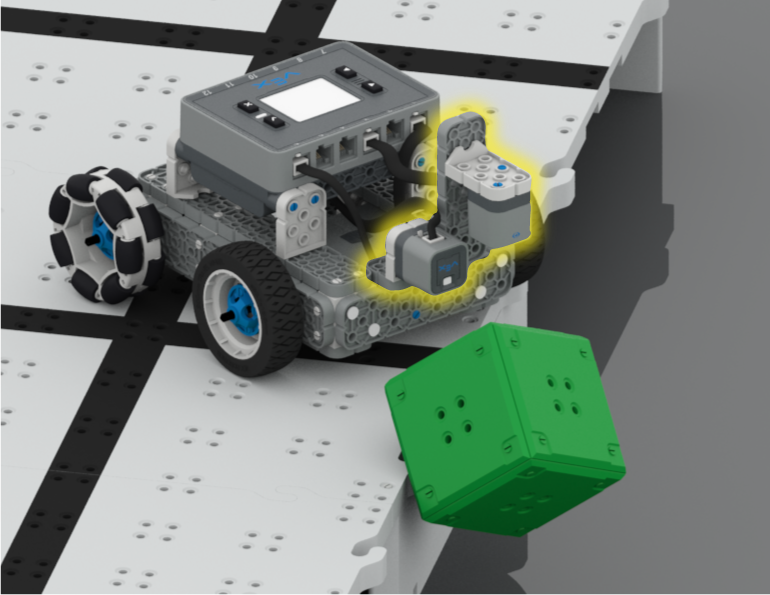
Celem tego wyzwania jest jak najszybsze zepchnięcie wszystkich czterech kostek z pola. Poniższa animacja pokazuje przykład ustawienia pola i rozpoczęcia zawodów. Zobaczysz, jak robot wykrywa i odpycha pierwszą kostkę, a następnie rusza, aby wykryć następną kostkę. Animacja pokaże koniec próby czasowej, gdy czwarta kostka zostanie zepchnięta z pola!
Wykonaj kroki opisane w tym dokumencie, aby ukończyć wyzwanie Cube Crasher Challenge Google / .docx / .pdf
Po ukończeniu wyzwania Cube Crasher skontaktuj się ze swoim nauczycielem. Upewnij się, że udokumentowałeś wyniki wyzwania w swoim notatniku inżynierskim.
Podsumowanie refleksji
Teraz, gdy stworzyłeś strategię i wziąłeś udział w wyzwaniu Cube Crasher, nadszedł czas, aby zastanowić się nad tym, czego się nauczyłeś i zrobiłeś podczas tej lekcji. Rozpocznij nową stronę w swoim notatniku inżynierskim, aby rozpocząć refleksję.
Oceń siebie jako nowicjusza, praktykanta lub eksperta w zakresie każdej z poniższych koncepcji w swoim notatniku inżynierskim. Podaj krótkie wyjaśnienie, dlaczego przyznałeś sobie taką ocenę dla każdej koncepcji:
- Dodanie czujnika odległości do BaseBota i użycie go w projekcie VEXcode IQ do wykrywania sześcianu
- Budowanie i iterowanie projektu, aby robot wykrywał i przenosił kostki poza Pole
- Współpraca z członkami mojego zespołu przy tworzeniu projektu VEXcode IQ, który wspiera naszą strategię gry
Skorzystaj z tej tabeli, aby określić, do której kategorii należysz.
|
Ekspert |
Czuję, że w pełni zrozumiałem tę koncepcję i mógłbym nauczyć tego kogoś innego. |
| Uczeń | Uważam, że zrozumiałem tę koncepcję na tyle, aby móc wziąć udział w wyzwaniu. |
| Nowicjusz | Czuję, że nie zrozumiałem koncepcji i nie wiem, jak ukończyć wyzwanie. |
Co dalej?
W tej lekcji dowiedziałeś się o czujniku odległości i o tym, jak można go wykorzystać w robocie do wykrywania obiektów. Nauczyłeś się także, jak używać bloku [Czekaj do] w projekcie ze sprzężeniem zwrotnym z czujnika. Zbudowałeś i wykonałeś iteracje swojego projektu VEXcode IQ, aby wykrywać i przenosić kostki z pola, a także brałeś udział w wyzwaniu Cube Crasher Challenge.
Na następnej lekcji będziesz:
- Dowiedz się o czujniku optycznym i o tym, jak można go wykorzystać w projekcie
- Dowiedz się, czym jest algorytm i jak można go wykorzystać
- Weź udział w wyzwaniu Lekcji 4
Wybierz < Wróć do lekcji , aby wrócić do przeglądu lekcji.
Wybierz Następna lekcja > , aby przejść do lekcji 4 i poznać czujnik optyczny i algorytmy.