
استكشاف السرعة - الجزء 2
الخطوة 1: أضف دبوس موصل إلى محور العجلة.

- يجب على المُنشئ إضافة دبوس موصل 1 × 1 إلى أحد محاور العجلات حتى تتمكن بسهولة من معرفة مدى سرعة دوران المحرك والعجلة.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
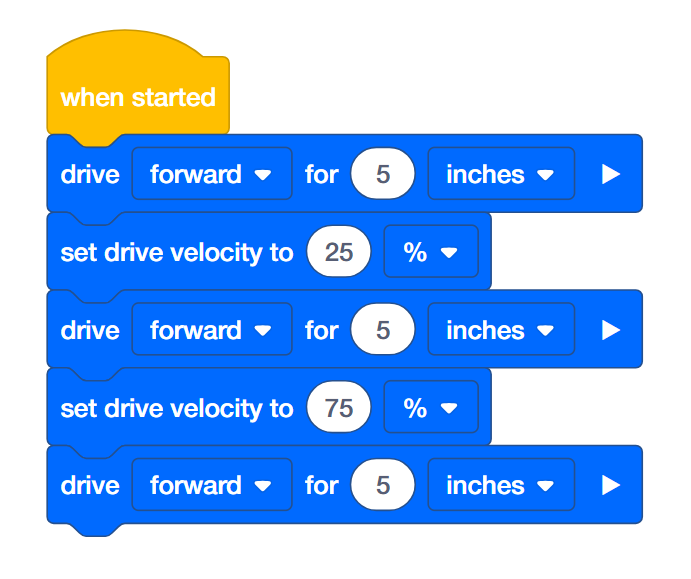
أشر إلى أنه في منطقة البرمجة، يوجد بالفعل {when started} كتلة موجودة هناك بشكل افتراضي.
سيبدأ كل برنامج بهذه الكتلة. عند بدء تشغيل البرنامج، سيتم اتباع الكتل المتصلة بالتسلسل
الذي يتم وضعها فيه.
اشرح النقر على كتلة [محرك الأقراص] وسحبها إلى منطقة البرمجة،
وربطها {when started} بالكتلة. ستسمع نقرة عند إرفاقها. المربعات
الثانية والثالثة
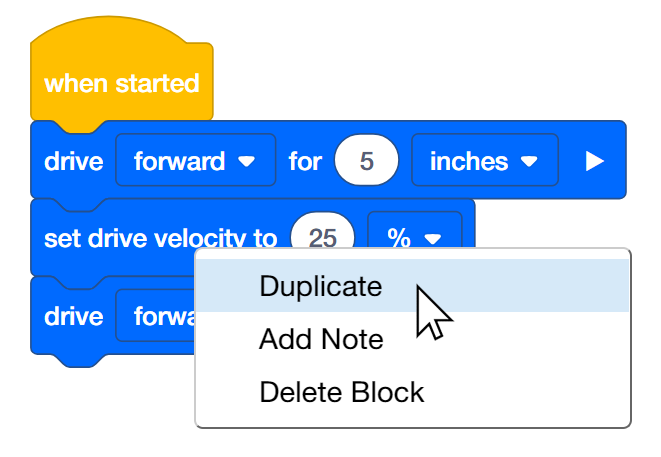
هي نفسها المربعات الرابعة والخامسة. بعد إضافة المكوِّن الثالث، يمكن للمبرمج النقر بزر
الماوس الأيمن أو الطويل على المكوِّن الثاني واختيار Duplicate لإضافة المكوِّنين الرابع
والخامس. ثم يمكن تغيير سرعة الكتلة الرابعة إلى 75 ٪.
الخطوة 2: تقدم للأمام لمسافة 15 بوصة بسرعات مختلفة
-
يجب على المبرمج بناء هذا المشروع في VEXcode IQ.
-
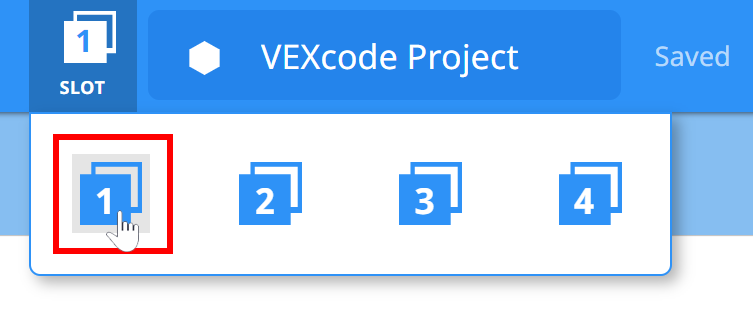
انقر على أيقونة الفتحة. يمكنك تنزيل مشروعك إلى واحدة من الفتحات الأربع المتاحة في Robot Brain. اضغط على الرقم 1.
-
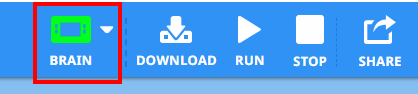
يجب على المبرمج توصيل الروبوت بالكمبيوتر أو الكمبيوتر اللوحي. يتحول رمز الدماغ في شريط الأدوات إلى اللون الأخضر بمجرد إجراء اتصال ناجح.
-
بعد ذلك، انقر فوق الزر تنزيل على شريط الأدوات لتنزيل مشروع Drive Velocity إلى Robot Brain.
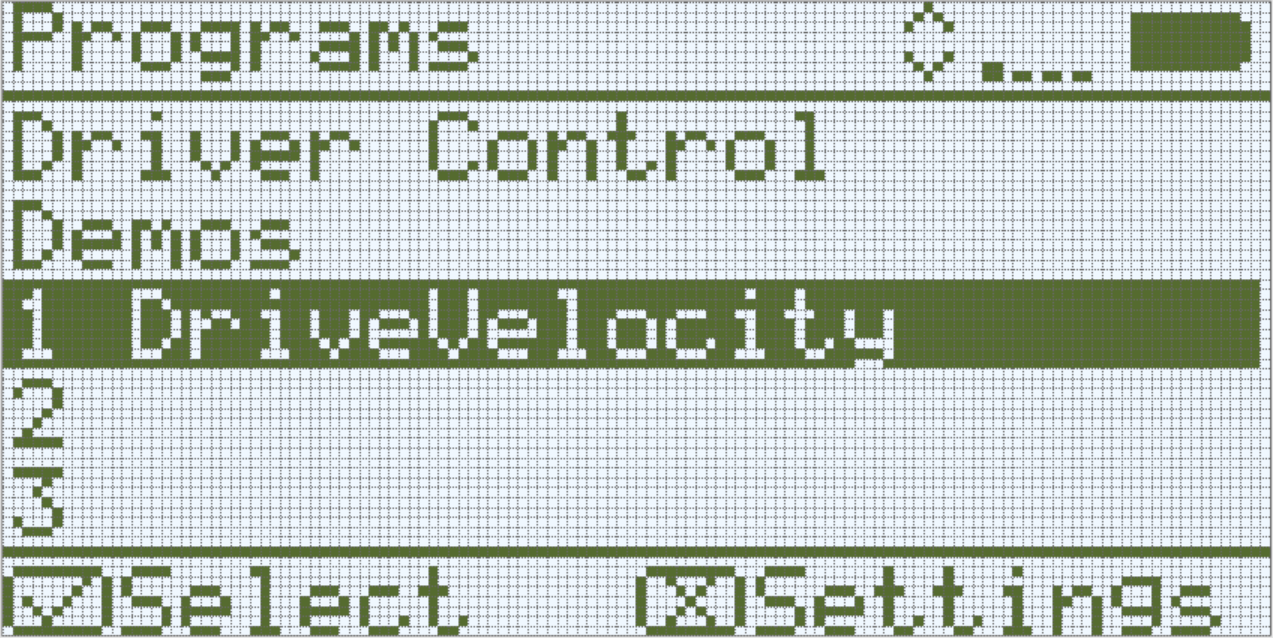
- يجب على المشغل التحقق للتأكد من تنزيل مشروعك إلى دماغ الطيار الآلي من خلال النظر إلى شاشة دماغ الروبوت. يجب إدراج اسم المشروع في الشريحة 1.
- يجب على السائق الآن تشغيل المشروع على روبوت الطيار الآلي عن طريق التأكد من تمييز المشروع ثم الضغط على زر التحقق.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
-
توقف وناقش
اطلب من الطلاب التنبؤ بما يعتقدون أنه سيحدث عند تنزيل هذا المشروع وتشغيله على روبوت الطيار الآلي. اطلب من الطلاب تسجيل توقعاتهم في دفاتر ملاحظاتهم الهندسية. إذا سمح الوقت، اطلب من كل مجموعة مشاركة تنبؤاتها.يجب على الطلاب التنبؤ بأن الطيار الآلي سيتحرك أولاً للأمام بسرعة افتراضية (50 ٪)، ثم أبطأ (25 ٪) من السرعة الافتراضية، ثم أسرع (75 ٪) من السرعة الافتراضية.
-
نموذج
النموذج الأول الذي يدير المشروع أمام الفصل قبل أن يحاول جميع الطلاب في وقت واحد. اجمع الطلاب في منطقة واحدة واترك مساحة كافية للطيار الآلي للتحرك 15 بوصة إذا تم وضعه على الأرض.أخبر الطلاب أنه حان دورهم الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن يصادف أي طيار آلي بعضهم البعض.
الخطوة 3: القيادة للأمام والخلف بسرعات مختلفة
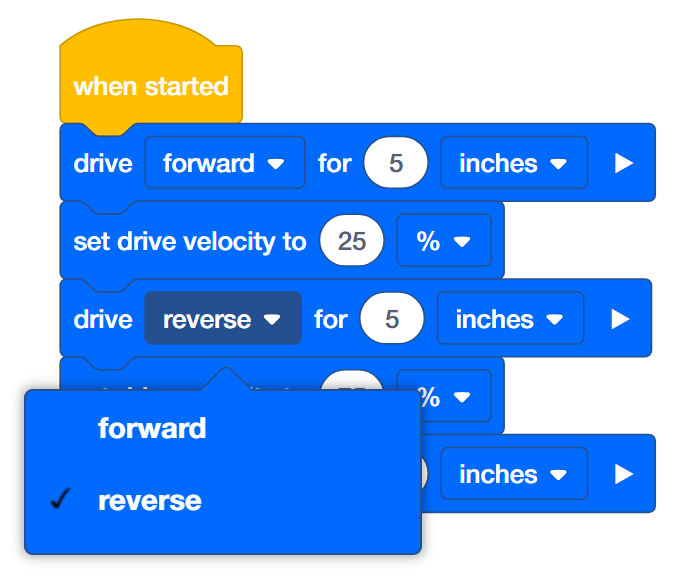
- يجب على المبرمج تغيير محرك الأقراص الثاني للكتلة للقيادة في الاتجاه المعاكس بدلاً من الأمام.
- يجب على المبرمج بعد ذلك تنزيل المشروع.
- يجب على السائق الآن تشغيل المشروع على روبوت الطيار الآلي عن طريق التأكد من تمييز المشروع والضغط على زر التحقق.
![]() صندوق أدوات المعلم
-
إكمال الخطوة 3
صندوق أدوات المعلم
-
إكمال الخطوة 3
-
ليست هناك حاجة لحفظ المشروع مرة أخرى لأن VEXcode IQ سيحفظ تلقائيًا.
-
لتغيير كتلة [drive for] من الأمام إلى الخلف، ما عليك سوى النقر على القائمة المنسدلة وتحديد العكس.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، فذكرهم بفصل كابل USB عن Robot Brain قبل تشغيل البرنامج.
-
نظرًا لأننا لا نختار خانة جديدة، فسيتم تنزيل البرنامج الجديد إلى الخانة 1 واستبدال البرنامج السابق.