
1 veiksmas: pridėkite jungties kaištį prie rato stebulės.

-
Statybininkas turėtų pridėti 1x1 jungties kaištį prie vienos iš ratų stebulių, kad galėtumėte lengvai matyti, kaip greitai sukasi variklis ir ratas.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
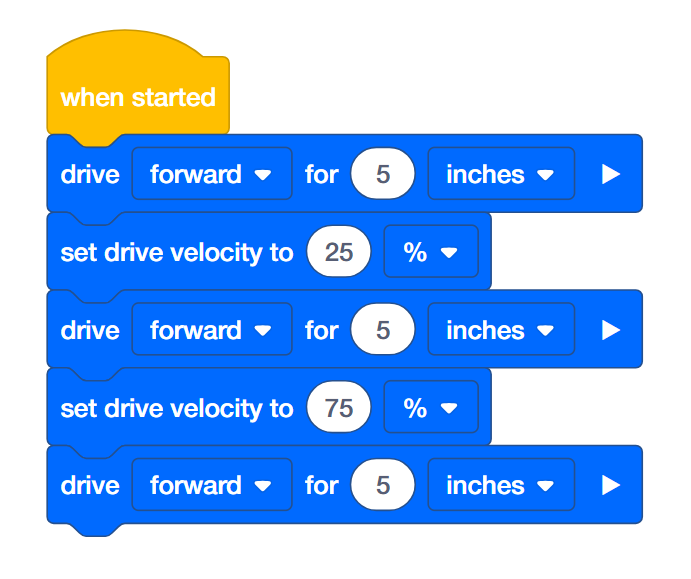
Atkreipkite dėmesį, kad programavimo srityje pagal numatytuosius nustatymus jau yra {when started} blokas. Kiekviena programa prasidės šiuo bloku. Kai programa paleidžiama, prijungti blokai bus sekami tokia seka, kokia jie dedami.
Parodykite, kad spustelėjote [drive] bloką ir vilkite jį į programavimo sritį, prijungdami jį prie {when started} bloko. Pritvirtinus išgirsite spragtelėjimą.
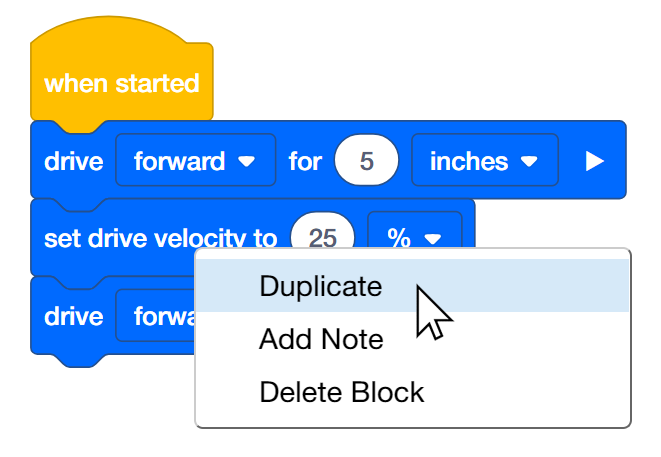
Antrasis ir trečiasis blokai yra tokie patys kaip ketvirtasis ir penktasis blokai. Pridėjęs trečią bloką, programuotojas gali dešiniuoju arba ilguoju pelės mygtuku spustelėti antrąjį bloką ir pasirinkti Duplicate, kad pridėtų ketvirtą ir penktą blokus. Tada ketvirtojo bloko greitis gali būti pakeistas iki 75%.
2 veiksmas: važiuokite į priekį 15 colių skirtingais greičiais
-
Programuotojas turėtų sukurti šį projektą VEXcode IQ.
-
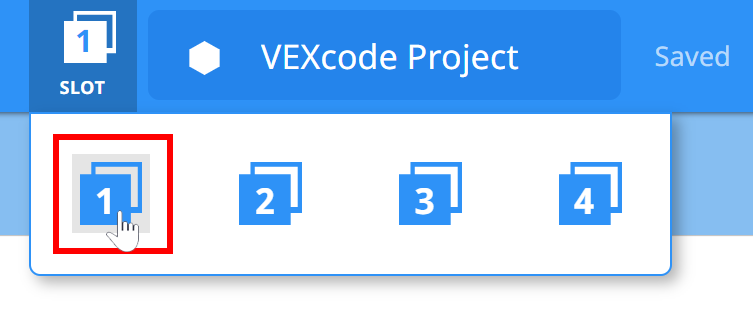
Spustelėkite lizdo piktogramą. Savo projektą galite atsisiųsti į vieną iš keturių galimų roboto smegenų lizdų. Spustelėkite skaičių 1.
-
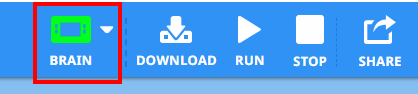
Programuotojas turi prijungti robotą prie kompiuterio ar planšetinio kompiuterio. Sėkmingai užmezgus ryšį, įrankių juostoje esanti smegenų piktograma tampa žalia.
-
Tada įrankių juostoje spustelėkite mygtuką Atsisiųsti, kad atsisiųstumėte Drive Velocity projektą į roboto smegenis.
-
Operatorius turėtų patikrinti, ar jūsų projektas atsisiųstas į Autopiloto smegenis, žiūrėdamas į roboto smegenų ekraną. Projekto pavadinimas turi būti nurodytas 1 plyšyje.
-
Dabar vairuotojas turėtų vykdyti projektą su robotu Autopilotu, įsitikindamas, kad projektas yra paryškintas, tada paspauskite mygtuką Tikrinti.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Paprašykite mokinių nuspėti, kas, jų manymu, nutiks, kai šis projektas bus atsiųstas ir paleistas naudojant robotą Autopilotą. Pasakykite mokiniams savo prognozes įrašyti į savo inžinerijos sąsiuvinius. Jei laikas leidžia, paprašykite kiekvienos grupės pasidalyti savo prognozėmis.Mokiniai turėtų numatyti, kad Autopilotas pirmiausia judės pirmyn numatytuoju greičiu (50 %), tada lėčiau (25 %) nei numatytasis, o paskui greičiau (75 %) nei numatytasis greitis.
-
Pirmas modelis
Modeliuokite projekto vykdymą prieš klasę, kol visi mokiniai bando iš karto. Surinkite mokinius vienoje srityje ir palikite pakankamai vietos, kad Autopilotas galėtų judėti 15 colių, jei jis pastatytas ant grindų.Pasakykite mokiniams, kad dabar jų eilė vykdyti savo projektą. Įsitikinkite, kad jie turi aiškų kelią ir kad jokie autopilotai nesusidurs.
3 veiksmas: važiuokite pirmyn ir atbuline eiga skirtingais greičiais
-
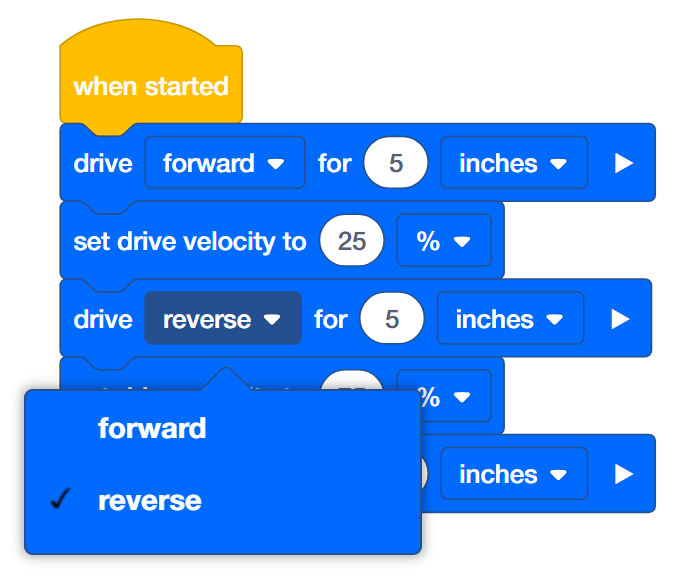
Programuotojas turėtų pakeisti antrąjį pavarą į bloką, kad važiuotų atbuline eiga, o ne pirmyn.
-
Tada programuotojas turėtų atsisiųsti projektą.
-
Dabar vairuotojas turėtų paleisti projektą su robotu Autopilotu, įsitikindamas, kad projektas yra paryškintas, ir paspausdamas mygtuką Tikrinti.
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
-
Nereikia dar kartą išsaugoti projekto, nes VEXcode IQ išsaugos automatiškai.
-
Norėdami pakeisti bloką [drive for] iš pirmyn į atgal, tiesiog spustelėkite išskleidžiamąjį meniu ir pasirinkite atgal.
-
Jei mokiniai naudojasi kompiuteriu, priminkite jiems, kad prieš paleisdami programą atjunkite USB kabelį nuo Robot Brain.
-
Kadangi mes nesirenkame naujo lizdo, nauja programa atsisiųs į 1 lizdą ir pakeis ankstesnę programą.