
ステップ 1: ホイールハブにコネクタピンを追加します。

-
ビルダーは、モーターとホイールの回転速度を簡単に確認できるように、ホイール ハブの 1 つに 1x1 コネクタ ピンを追加する必要があります。
![]() 教師用ツールボックス
教師用ツールボックス
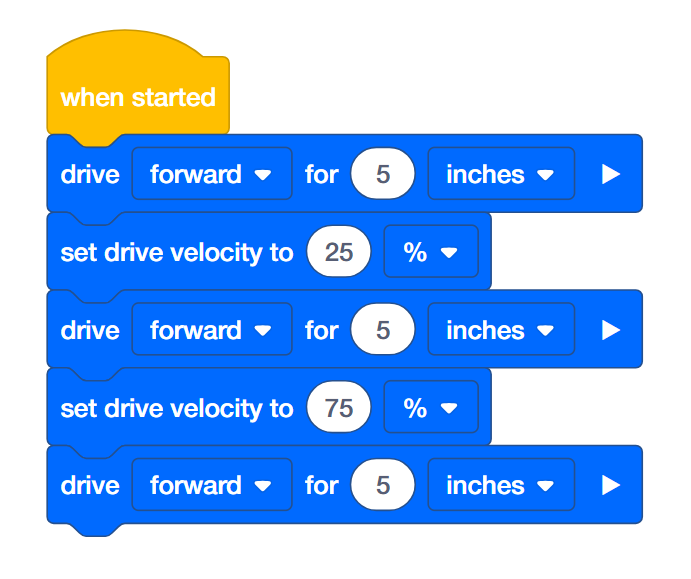
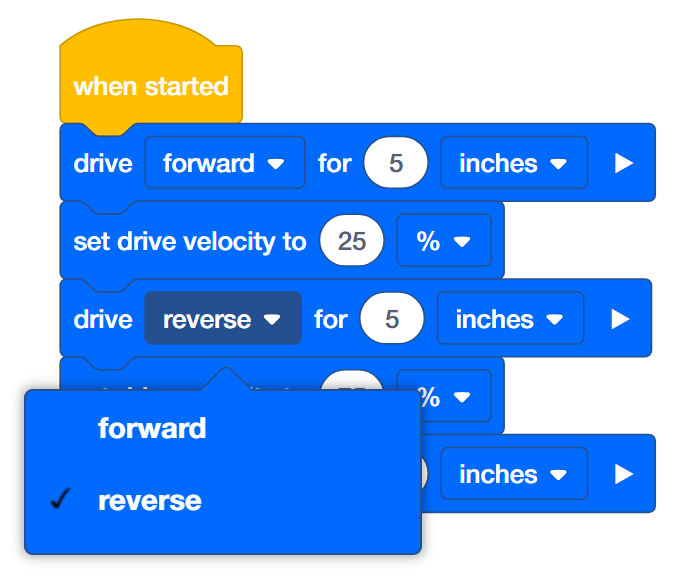
プログラミング領域には、デフォルトですでに {when started} ブロックが配置されていることを指摘します。 すべてのプログラムはこのブロックから始まります。 プログラムが開始されると、接続されたブロックが配置された順序でたどられます。
[ドライブ] ブロックをクリックしてプログラミング領域にドラッグし、 {when started} ブロックに接続する方法を説明します。 取り付けると「カチッ」と音がします。
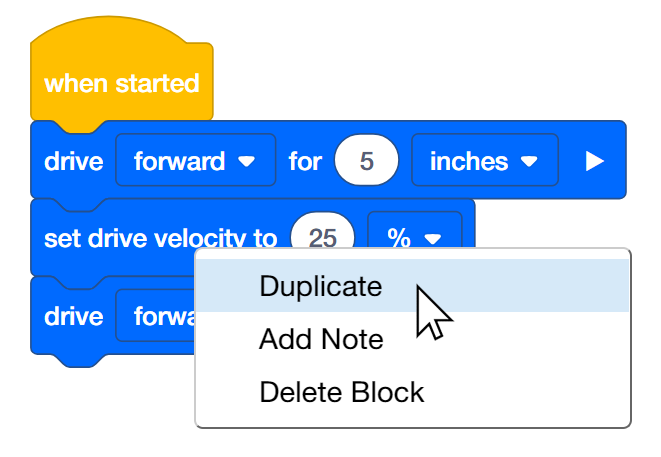
2 番目と 3 番目のブロックは 4 番目と 5 番目のブロックと同じです。 3 番目のブロックを追加した後、プログラマは 2 番目のブロックを右クリックまたは長押しして [複製] を選択し、4 番目と 5 番目のブロックを追加します。 次に、4 番目のブロックの速度を 75% に変更できます。
ステップ 2: さまざまな速度で 15 インチ前進する
-
プログラマは、VEXcode IQ でこのプロジェクトをビルドする必要があります。
-
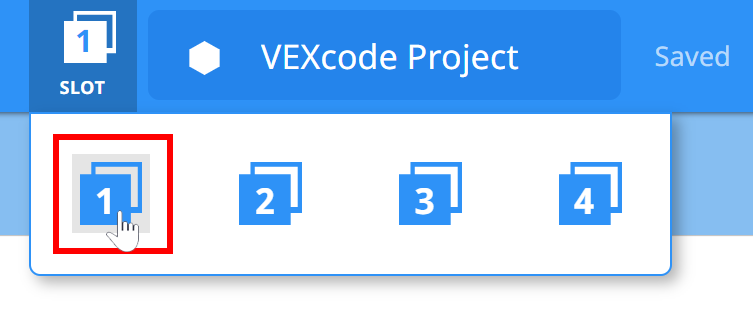
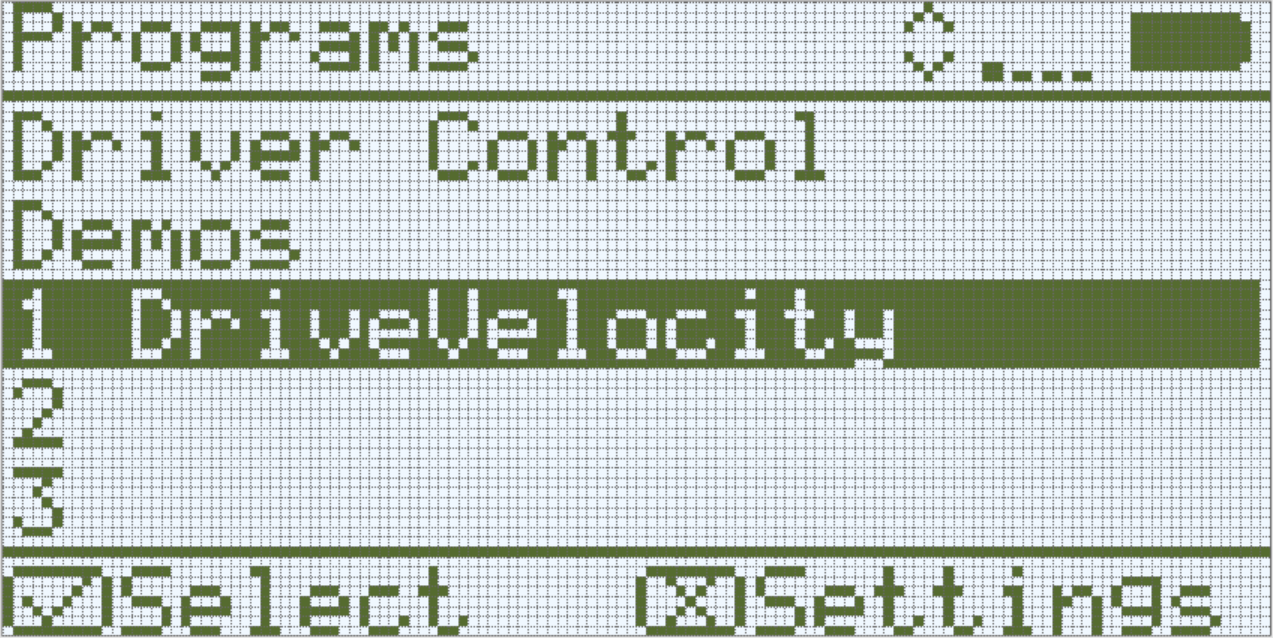
スロットアイコンをクリックします。 プロジェクトは、Robot Brain の 4 つの利用可能なスロットの 1 つにダウンロードできます。 数字の「1」をクリックします。
-
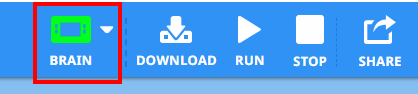
プログラマーはロボットをコンピューターまたはタブレットに接続する必要があります。 接続が成功すると、ツールバーの Brain アイコンが緑色に変わります。
-
次に、ツールバーの [ダウンロード] ボタンをクリックして、Drive Velocity プロジェクトをロボット ブレインにダウンロードします。
-
オペレーターはロボット ブレインの画面を見て、プロジェクトがオートパイロットのブレインにダウンロードされたことを確認する必要があります。 プロジェクト名はスロット 1 にリストされている必要があります。
-
ドライバーは、プロジェクトが強調表示されていることを確認し、[チェック] ボタンを押して、オートパイロット ロボット上でプロジェクトを実行する必要があります。
![]() 教師用ツールボックス
教師用ツールボックス
-
立ち止まって話し合う
このプロジェクトをダウンロードして Autopilot ロボットで実行すると何が起こるかを生徒に予想してもらいます。 生徒たちに、予想を工学ノートに記録するように伝えます。 時間があれば、各グループに予想を共有してもらいます。生徒は、オートパイロットが最初にデフォルトの速度 (50%) で前進し、次にデフォルトの速度より遅く (25%)、次にデフォルトの速度より速く (75%) 進むと予測する必要があります。
-
最初にモデルを示します
生徒全員に一度に挑戦してもらう前に、クラスの前でプロジェクトを実行するモデルを示します。 生徒を 1 つのエリアに集め、オートパイロットが床に置かれた場合に 15 インチ動かせるのに十分なスペースを確保します。今度は自分たちがプロジェクトを実行する番だと生徒たちに伝えます。 明確な道があり、オートパイロットが互いにぶつからないことを確認してください。
![]() 教師用ツールボックス
-
ステップ 3 の完了
教師用ツールボックス
-
ステップ 3 の完了
-
VEXcode IQ は自動保存するため、プロジェクトを再度保存する必要はありません。
-
[drive for] ブロックを forward から backwardに変更するには、ドロップダウン メニューをクリックして backwardを選択します。
-
生徒がコンピュータを使用している場合は、プログラムを実行する前に Robot Brain から USB ケーブルを外すよう注意してください。
-
新しいスロットを選択していないため、新しいプログラムがスロット 1 にダウンロードされ、以前のプログラムが置き換えられます。