
Erforschung der Geschwindigkeit - Teil 2
Schritt 1: Fügen Sie einen Steckerstift zur Radnabe hinzu.

- Der Hersteller sollte einen 1x1-Anschlussstift an einer der Radnaben anbringen, damit Sie leicht sehen können, wie schnell sich der Motor und das Rad drehen.
![]() Lehrer-Toolbox
Lehrer-Toolbox
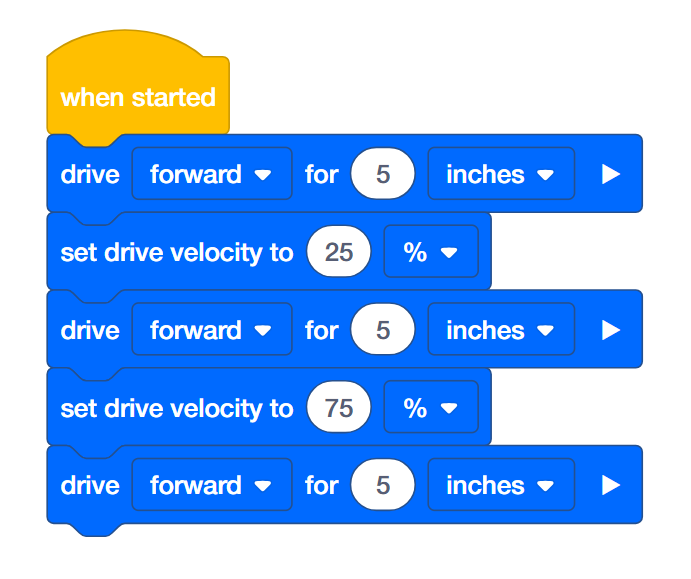
Weisen Sie darauf hin, dass sich im Programmierbereich standardmäßig bereits ein {when started} Block befindet. Jedes Programm beginnt mit diesem Block. Wenn das Programm gestartet wird, werden die verbundenen Blöcke in der Reihenfolge verfolgt, in der sie platziert werden.
Demonstrieren Sie, dass Sie auf den [Laufwerk] -Block klicken und ihn in den Programmierbereich ziehen und mit dem {when started} Block verbinden. Sie werden ein Klicken hören, wenn es angehängt wird.
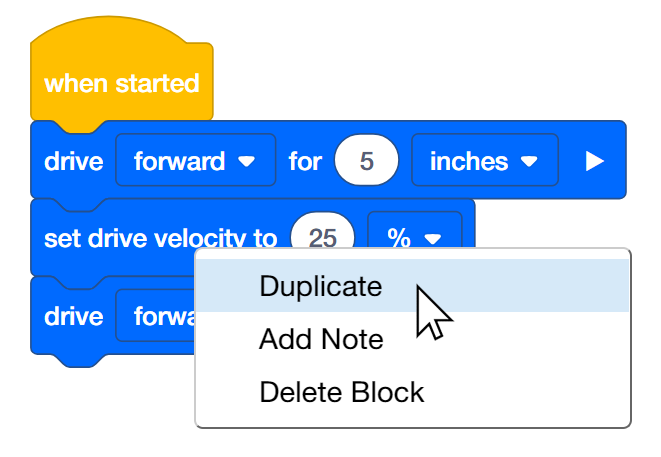
Der zweite und dritte Block sind die gleichen wie der vierte und fünfte Block. Nach dem Hinzufügen des dritten Blocks kann der Programmierer mit der rechten Maustaste auf den zweiten Block klicken und Duplizieren wählen, um den vierten und fünften Block hinzuzufügen. Dann kann die Geschwindigkeit des vierten Blocks auf 75% geändert werden.
Schritt 2: Fahren Sie mit unterschiedlichen Geschwindigkeiten 15 Zoll vorwärts
-
Der Programmierer sollte dieses Projekt in VEXcode IQ erstellen.
-
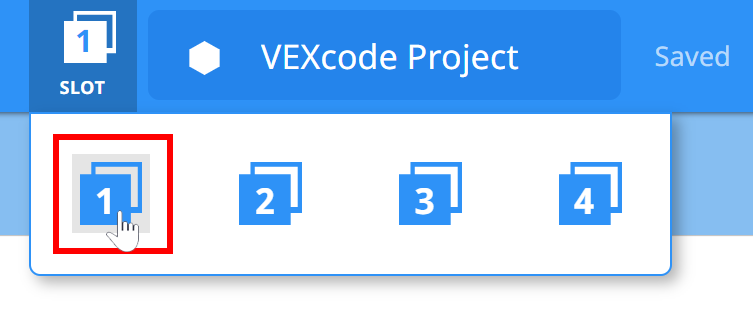
Klicken Sie auf das Slot-Symbol. Sie können Ihr Projekt auf einen der vier verfügbaren Slots im Robot Brain herunterladen. Klicken Sie auf die Zahl 1.
-
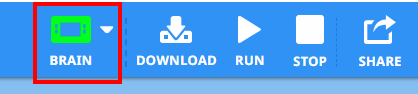
Der Programmierer sollte den Roboter mit Ihrem Computer oder Tablet verbinden. Das Gehirn-Symbol in der Symbolleiste wird grün, sobald eine erfolgreiche Verbindung hergestellt wurde.
-
Klicken Sie dann auf die Schaltfläche Download in der Symbolleiste, um das Drive Velocity-Projekt in das Robot Brain herunterzuladen.
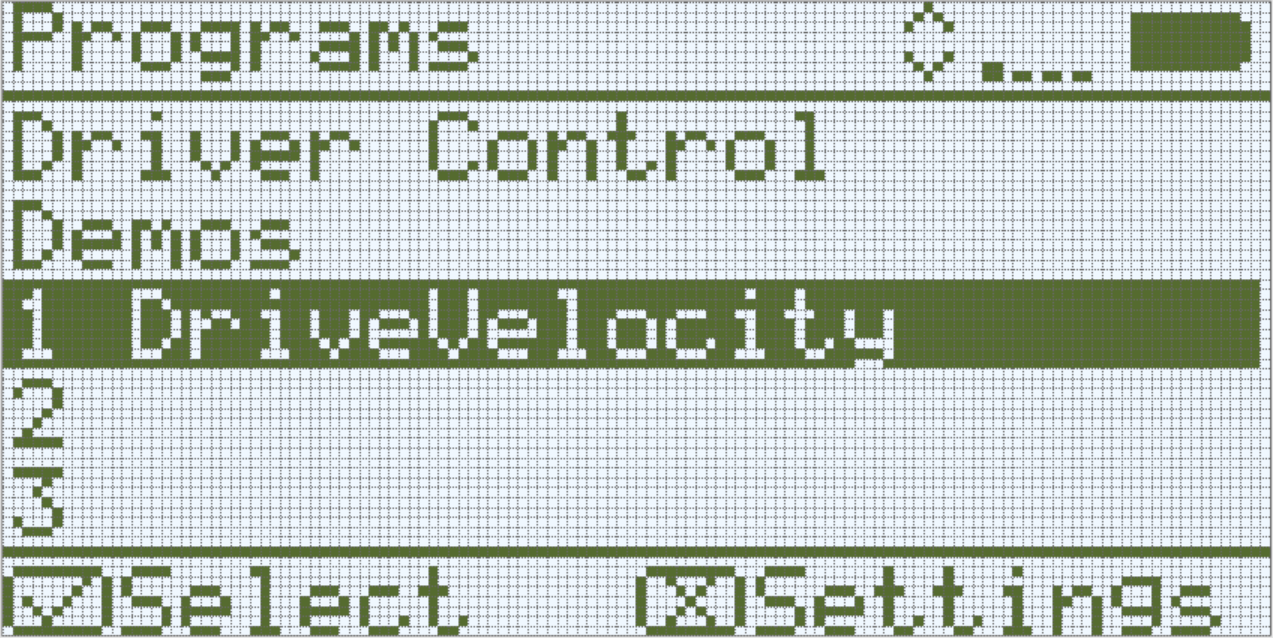
- Der Bediener sollte überprüfen, ob Ihr Projekt in das Gehirn des Autopiloten heruntergeladen wurde, indem er auf den Bildschirm des Roboterhirns schaut. Der Projektname sollte in Steckplatz 1 aufgeführt werden.
- Der Fahrer sollte nun das Projekt auf dem Autopilot-Roboter ausführen, indem er sicherstellt, dass das Projekt hervorgehoben ist, und dann die Schaltfläche Überprüfen drücken.
![]() Lehrer-Toolbox
Lehrer-Toolbox
-
Stopp und Diskussion
Bitten Sie die Schüler, vorherzusagen, was ihrer Meinung nach passieren wird, wenn dieses Projekt heruntergeladen und auf dem Autopilot-Roboter ausgeführt wird. Bitten Sie die Schüler, ihre Vorhersagen in ihren technischen Notizbüchern festzuhalten. Wenn es die Zeit erlaubt, bitten Sie jede Gruppe, ihre Vorhersage mitzuteilen.Die Schüler sollten vorhersagen, dass sich der Autopilot zuerst mit seiner Standardgeschwindigkeit (50 %) vorwärts bewegt, dann langsamer (25 %) als die Standardgeschwindigkeit und dann schneller (75 %) als die Standardgeschwindigkeit.
-
Modellieren Sie das erste
Modell, das das Projekt vor der Klasse durchführt, bevor Sie alle Schüler gleichzeitig ausprobieren. Versammeln Sie die Schüler in einem Bereich und lassen Sie genügend Platz für den Autopiloten, um sich 15 Zoll zu bewegen, wenn er auf dem Boden platziert wird.Sagen Sie den Schülern, dass sie jetzt an der Reihe sind, ihr Projekt durchzuführen. Stellen Sie sicher, dass sie einen freien Weg haben und dass keine Autopiloten aufeinander treffen.
Schritt 3: Vorwärts und rückwärts mit unterschiedlichen Geschwindigkeiten fahren
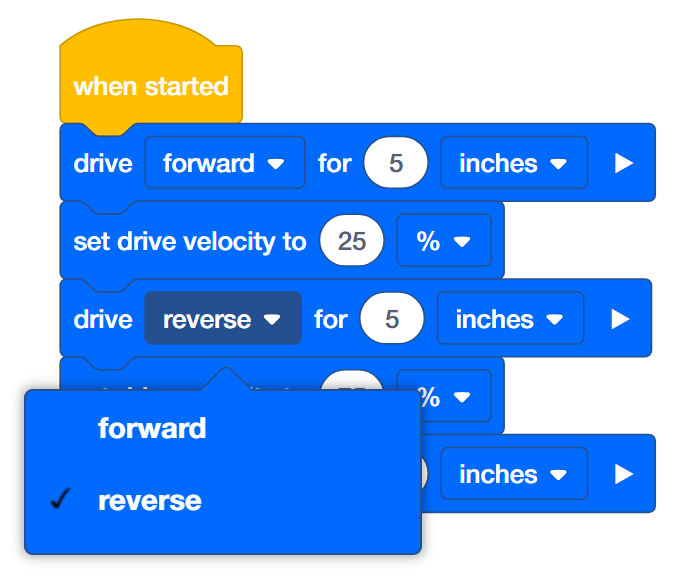
- Der Programmierer sollte den zweiten Antrieb für den Block so ändern, dass er rückwärts anstatt vorwärts fährt.
- Der Programmierer sollte dann das Projekt herunterladen.
- Der Fahrer sollte nun das Projekt auf dem Autopilot-Roboter ausführen, indem er sicherstellt, dass das Projekt hervorgehoben ist, und die Check-Taste drückt.
![]() Lehrer-Toolbox
- Schritt 3
abschließen
Lehrer-Toolbox
- Schritt 3
abschließen
-
Es besteht keine Notwendigkeit, das Projekt erneut zu speichern, da VEXcode IQ automatisch speichert.
-
Um den [Drive for] -Block von Vorwärts nach Rückwärts zu ändern, klicken Sie einfach auf das Dropdown-Menü und wählen Sie Rückwärts.
-
Wenn die Schüler einen Computer verwenden, erinnern Sie sie daran, das USB-Kabel vom Robot Brain zu trennen, bevor Sie das Programm ausführen.
-
Da wir keinen neuen Slot auswählen, wird das neue Programm auf Slot 1 heruntergeladen und ersetzt das vorherige Programm.