
การสำรวจความเร็ว - ส่วนที่ 2
ขั้นตอนที่ 1: เพิ่มพินตัวเชื่อมต่อไปยังดุมล้อ

- Builder ควรเพิ่มพินตัวเชื่อมต่อ 1x1 ลงในดุมล้อเพื่อให้คุณเห็นได้ง่ายว่ามอเตอร์และล้อหมุนเร็วแค่ไหน
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
ชี้ให้เห็นว่าในพื้นที่การเขียนโปรแกรมมี {when started} บล็อกอยู่แล้วโดยค่าเริ่มต้น
ทุกโปรแกรมจะเริ่มต้นด้วยบล็อคนี้
เมื่อโปรแกรมเริ่มต้นบล็อกที่เชื่อมต่อจะถูกติดตามตามลำดับที่วางไว้
สาธิตการคลิกที่บล็อก
[drive] และลากไปยังพื้นที่การเขียนโปรแกรมเชื่อมต่อกับ {when started} บล็อก
คุณจะได้ยินเสียงคลิกเมื่อติดบล็อก
ที่สองและสามเหมือนกับบล็อกที่สี่และห้า
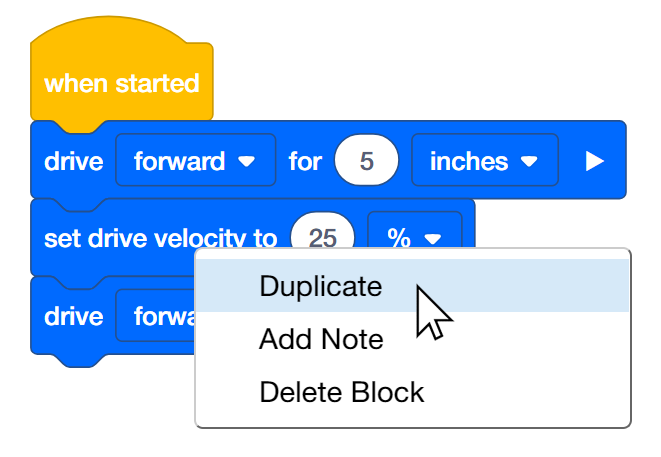
หลังจากเพิ่มบล็อกที่สามแล้วโปรแกรมเมอร์สามารถคลิกขวาหรือคลิกยาวบนบล็อกที่สองและเลือกทำซ้ำเพื่อเพิ่มบล็อกที่สี่และห้า
จากนั้นความเร็วของบล็อกที่สี่สามารถเปลี่ยนเป็น 75%
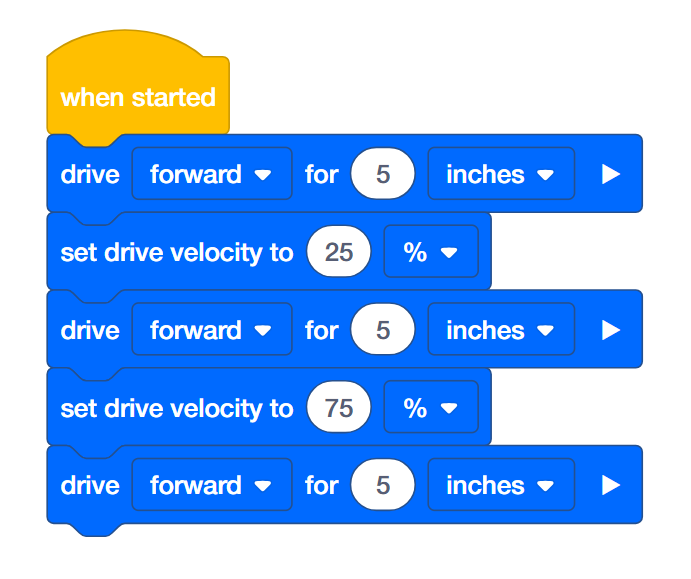
ขั้นตอนที่ 2: ขับไปข้างหน้า 15 นิ้วด้วยความเร็วที่แตกต่างกัน
-
โปรแกรมเมอร์ควรสร้างโครงการนี้ใน VEXcode IQ
-
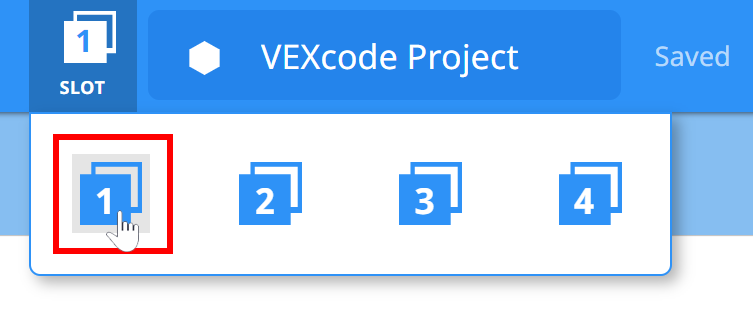
คลิกที่ไอคอนสล็อต คุณสามารถดาวน์โหลดโปรเจกต์ของคุณไปยังหนึ่งในสี่สล็อตที่มีอยู่ในสมองกล คลิกที่หมายเลข 1
-
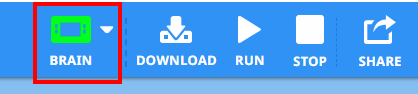
โปรแกรมเมอร์ควรเชื่อมต่อหุ่นยนต์กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอนสมองในแถบเครื่องมือจะเปลี่ยนเป็นสีเขียวเมื่อเชื่อมต่อสำเร็จแล้ว
-
จากนั้นคลิกปุ่มดาวน์โหลดบนแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Drive Velocity ไปยังสมองกล
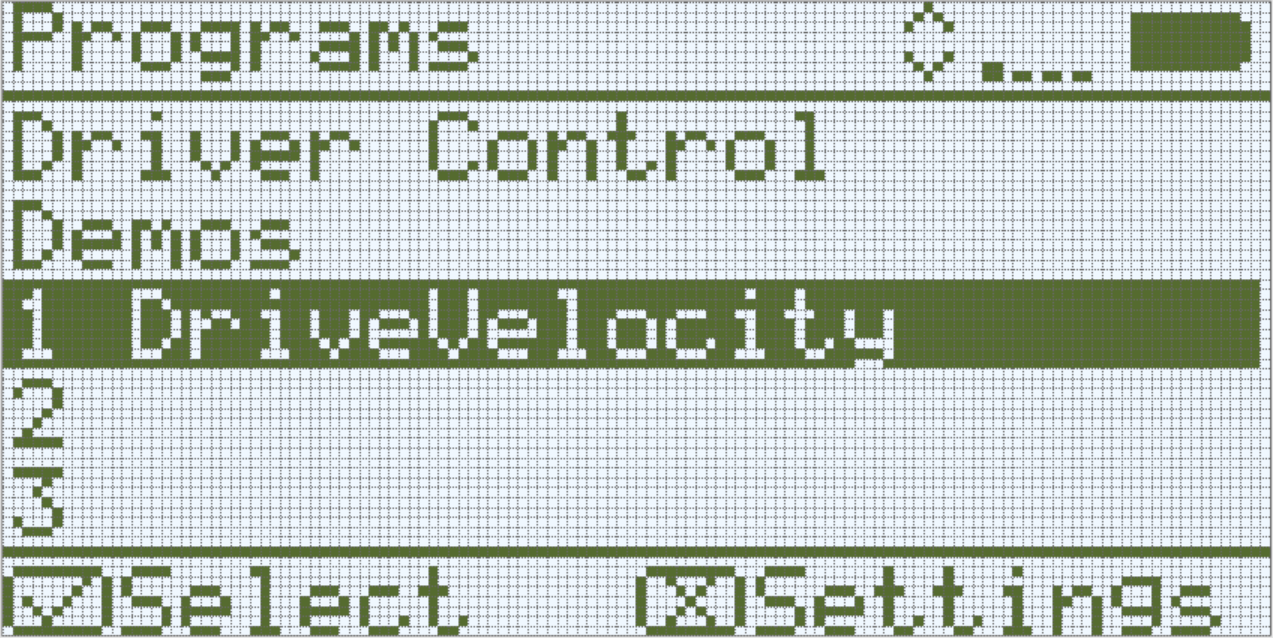
- ผู้ปฏิบัติงานควรตรวจสอบเพื่อให้แน่ใจว่าโครงการของคุณได้ดาวน์โหลดไปยังสมองของระบบขับเคลื่อนอัตโนมัติโดยดูที่หน้าจอสมองของหุ่นยนต์ ชื่อโปรเจกต์ควรอยู่ในช่องที่ 1
- ตอนนี้ผู้ขับควรเรียกใช้โปรเจกต์บนหุ่นยนต์ขับเคลื่อนอัตโนมัติโดยตรวจสอบให้แน่ใจว่าได้ไฮไลต์โปรเจกต์แล้วจากนั้นกดปุ่มตรวจสอบ
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
-
หยุดและสนทนา
ขอให้นักเรียนคาดการณ์สิ่งที่พวกเขาคิดว่าจะเกิดขึ้นเมื่อดาวน์โหลดโครงการนี้และทำงานบนหุ่นยนต์ขับเคลื่อนอัตโนมัติ บอกให้นักเรียนบันทึกการคาดการณ์ลงในสมุดบันทึกวิศวกรรม หากมีเวลาขอให้แต่ละกลุ่มแบ่งปันการคาดการณ์ของพวกเขานักเรียนควรคาดการณ์ว่า Autopilot จะเคลื่อนที่ไปข้างหน้าด้วยความเร็วเริ่มต้น (50%) จากนั้นช้ากว่า (25%) จากความเร็วเริ่มต้นและเร็วกว่า (75%) จากความเร็วเริ่มต้น
-
Model First
Model ดำเนินโครงการหน้าชั้นเรียนก่อนให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในพื้นที่เดียวและเหลือพื้นที่เพียงพอสำหรับ Autopilot ที่จะเคลื่อนย้ายได้ 15 นิ้วหากวางไว้บนพื้นบอกนักเรียนว่าตอนนี้ถึงตาพวกเขาแล้วที่จะดำเนินโครงการของพวกเขา ตรวจสอบให้แน่ใจว่ามีเส้นทางที่ชัดเจนและไม่มี Autopilots วิ่งชนกัน
ขั้นตอนที่ 3: ขับไปข้างหน้าและย้อนกลับด้วยความเร็วที่แตกต่างกัน
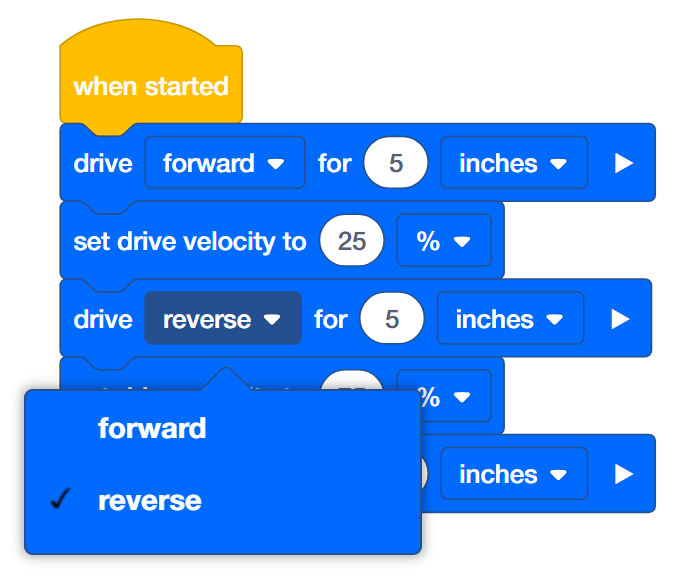
- โปรแกรมเมอร์ควรเปลี่ยนได รฟ์ที่สองสำหรับ บล็อกเพื่อขับรถย้อนกลับแทนที่จะไปข้างหน้า
- จากนั้นโปรแกรมเมอร์ควร ดาวน์โหล ดโครงการ
- ตอนนี้ผู้ขับควรเรียกใช้โปรเจกต์บนหุ่นยนต์ขับเคลื่อนอัตโนมัติโดยตรวจสอบให้แน่ใจว่าได้ไฮไลต์โปรเจ กต์แล้วและกดปุ่มตรวจสอบ
![]() กล่องเครื่องมือครู
-
ทำขั้นตอนที่ 3 ให้เสร็จ
กล่องเครื่องมือครู
-
ทำขั้นตอนที่ 3 ให้เสร็จ
-
ไม่จำเป็นต้องบันทึกโครงการอีกเพราะ VEXcode IQ จะบันทึกอัตโนมัติ
-
หากต้องการเปลี่ยนบล็อก [drive for] จาก ไปข้างหน้าเป็น ย้อน กลับเพียงคลิกที่เมนูแบบเลื่อนลงและเลือก ย้อนกลับ
-
หากนักเรียนใช้คอมพิวเตอร์เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนเรียกใช้โปรแกรม
-
เนื่องจากเราไม่ได้เลือกช่องใหม่โปรแกรมใหม่จะดาวน์โหลดไปยังช่องที่ 1 และแทนที่โปรแกรมก่อนหน้า