
Exploración de la velocidad - Parte 2
Paso 1: Añada un pasador de conexión al buje de la rueda.

- El constructor debe añadir un pasador de conexión 1x1 a uno de los cubos de las ruedas para que pueda ver fácilmente qué tan rápido están girando el motor y la rueda.
![]() Teacher Toolbox
Teacher Toolbox
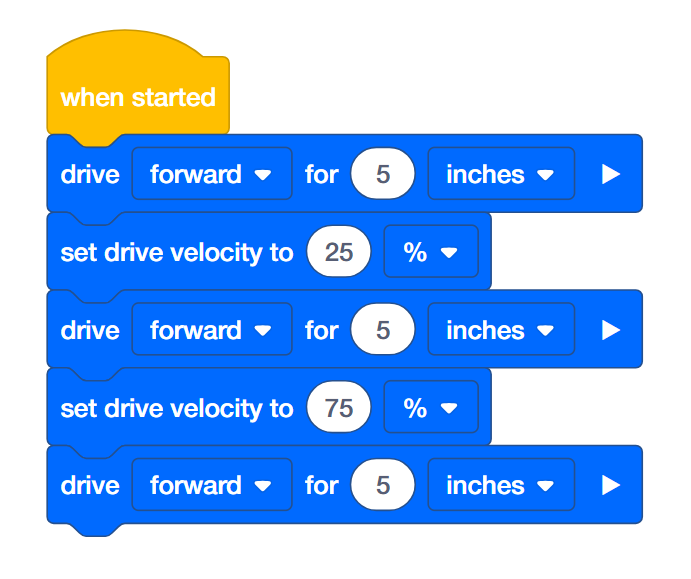
Señale que en el área de programación, ya hay un {when started} bloque ubicado allí por
defecto. Cada programa comenzará con este bloque. Cuando se inicie el programa, los
bloques conectados se seguirán en la secuencia en la que se colocan.
Demuestre
que hace clic en el bloque [Drive] y lo arrastra al área de programación, conectándolo
al {when started} bloque. Escuchará un clic cuando se conecte.
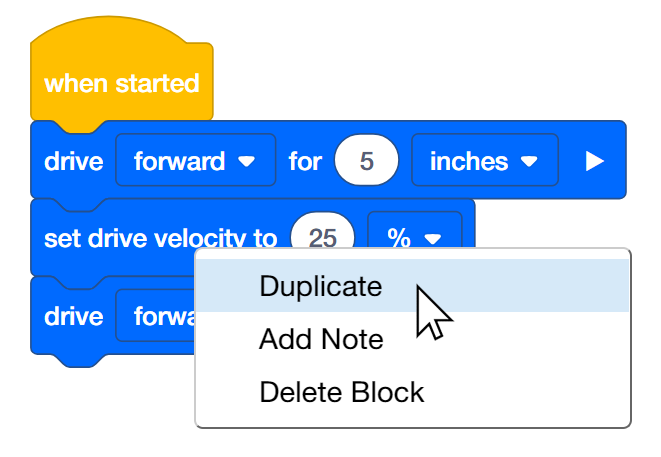
Los bloques
segundo y tercero son los mismos que los bloques cuarto y quinto. Después de añadir el
tercer bloque, el programador puede hacer clic con el botón derecho o largo en el
segundo bloque y elegir Duplicar para añadir el cuarto y quinto bloques. A continuación,
la velocidad del cuarto bloque se puede cambiar al 75%.
Paso 2: Conduzca hacia adelante 15 pulgadas a diferentes velocidades
-
El programador debe construir este proyecto en VEXcode IQ.
-
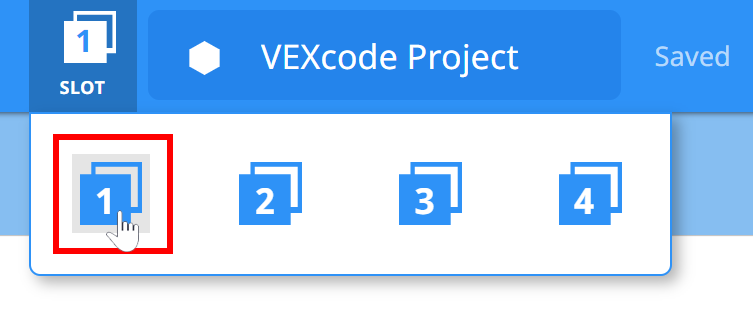
Haz clic en el icono de la ranura. Puedes descargar tu proyecto en uno de los cuatro espacios disponibles en el Robot Brain. Haz clic en el número 1.
-
El programador debe conectar el robot a su ordenador o tableta. El icono del cerebro en la barra de herramientas se vuelve verde una vez que se ha realizado una conexión exitosa.
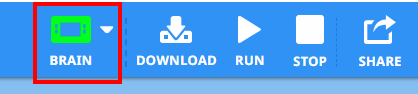
-
Luego, haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Drive Velocity en el Robot Brain.
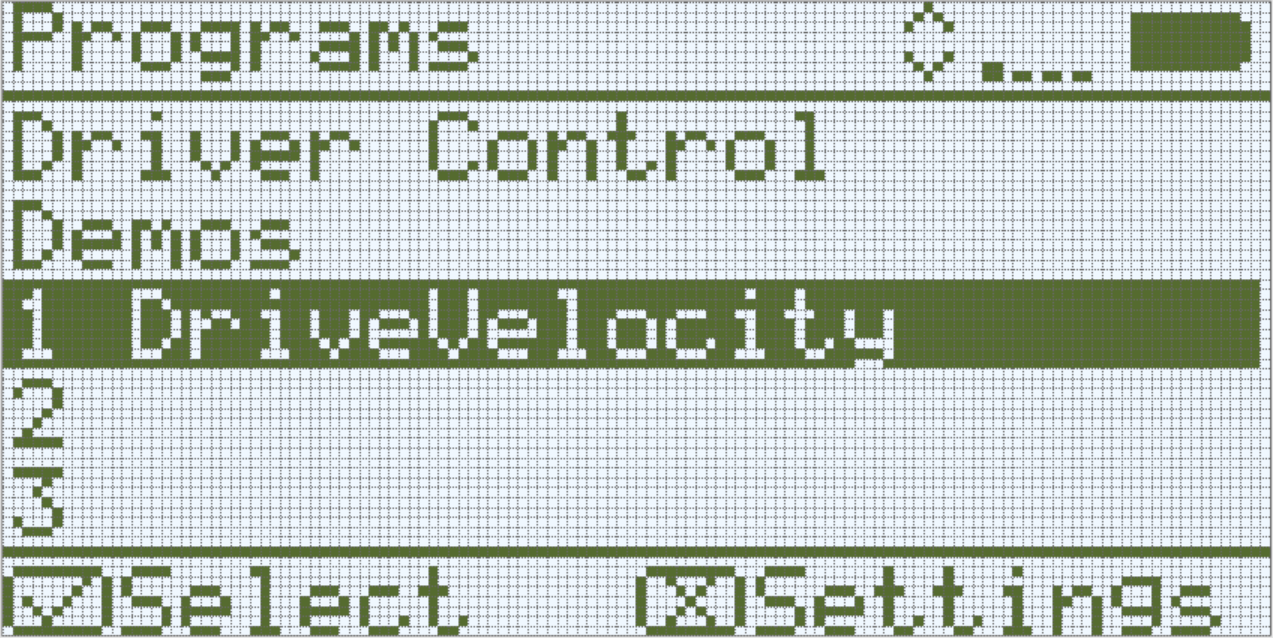
- El operador debe verificar que su proyecto se haya descargado en el cerebro del piloto automático mirando la pantalla del cerebro del robot. El nombre del proyecto debe aparecer en la ranura 1.
- El controlador ahora debe ejecutar el proyecto en el robot del piloto automático asegurándose de que el proyecto esté resaltado y luego presionar el botón Comprobar.
![]() Teacher Toolbox
Teacher Toolbox
-
Deténgase y discuta
Pida a los estudiantes que predigan lo que creen que sucederá cuando este proyecto se descargue y se ejecute en el robot Autopilot. Indique a los estudiantes que registren sus predicciones en sus cuadernos de ingeniería. Si el tiempo lo permite, pida a cada grupo que comparta su predicción.Los estudiantes deben predecir que el piloto automático primero avanzará a su velocidad predeterminada (50%), luego más lento (25%) que la velocidad predeterminada y luego más rápido (75%) que la velocidad predeterminada.
-
Model First
Model ejecutando el proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y deje suficiente espacio para que el piloto automático se mueva 15 pulgadas si se coloca en el suelo.Dígales a los estudiantes que ahora es su turno de ejecutar su proyecto. Asegúrese de que tengan un camino despejado y de que ningún piloto automático se encuentre con el otro.
Paso 3: Conduzca hacia adelante y hacia atrás a diferentes velocidades
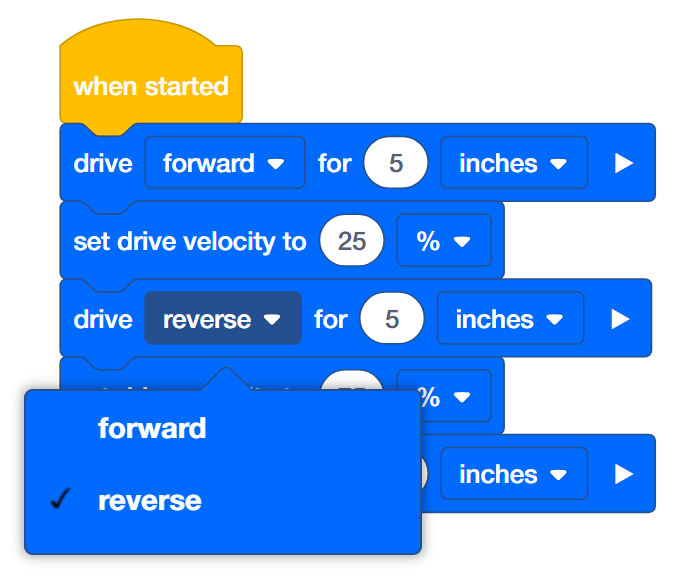
- El programador debe cambiar la segunda unidad para que el bloque conduzca en reversa en lugar de hacia adelante.
- A continuación, el programador debe descargar el proyecto.
- El conductor ahora debe ejecutar el proyecto en el robot del piloto automático asegurándose de que el proyecto esté resaltado y pulsando el botón Comprobar.
![]() Caja de herramientas del maestro
:
completar el paso 3
Caja de herramientas del maestro
:
completar el paso 3
-
No es necesario volver a guardar el proyecto porque VEXcode IQ se guardará automáticamente.
-
Para cambiar el bloque [Drive for] de avance a retroceso, simplemente haga clic en el menú desplegable y seleccione retroceso.
-
Si los estudiantes están usando un ordenador, recuérdeles que desconecten el cable USB de Robot Brain antes de ejecutar el programa.
-
Debido a que no estamos seleccionando una nueva ranura, el nuevo programa se descargará en la ranura 1 y reemplazará el programa anterior.