
Krok 1: Dodaj styk złącza do piasty koła.

-
Konstruktor powinien dodać styk złącza 1x1 do jednej z piast koła, aby można było łatwo sprawdzić, jak szybko obraca się silnik i koło.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
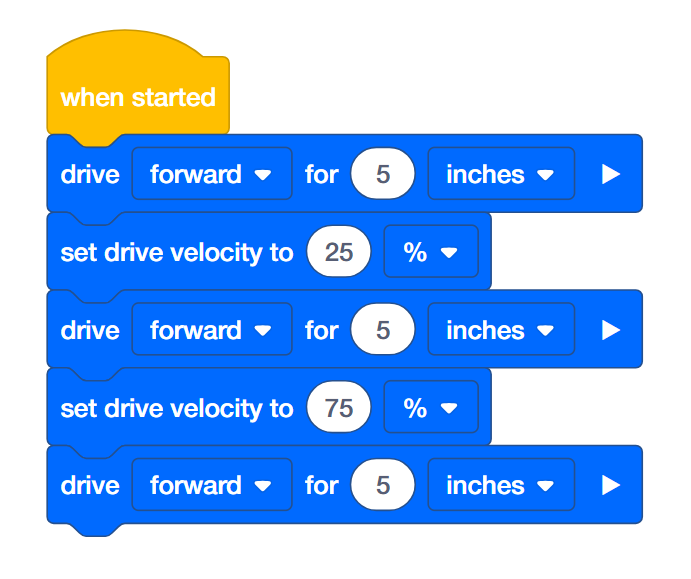
Zwróć uwagę, że w obszarze programowania domyślnie znajduje się już blok {when started}. Każdy program będzie zaczynał się od tego bloku. Po uruchomieniu programu połączone bloki będą śledzone w kolejności, w jakiej zostały ułożone.
Zademonstruj kliknięcie bloku [drive] i przeciągnięcie go do obszaru programowania, łącząc go z blokiem {when started}. Po podłączeniu usłyszysz kliknięcie.
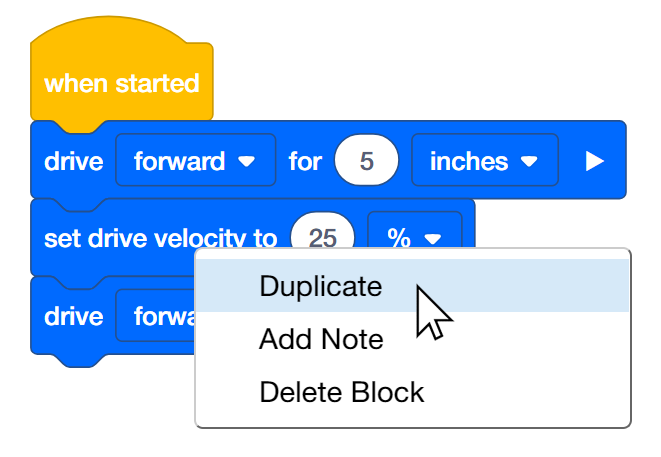
Drugi i trzeci blok są takie same jak czwarty i piąty blok. Po dodaniu trzeciego bloku Programista może kliknąć prawym przyciskiem myszy lub przytrzymać drugi blok i wybrać opcję Duplikuj, aby dodać czwarty i piąty blok. Następnie prędkość czwartego bloku można zmienić na 75%.
Krok 2: Jedź do przodu przez 15 cali z różnymi prędkościami
-
Programista powinien zbudować ten projekt w VEXcode IQ.
-
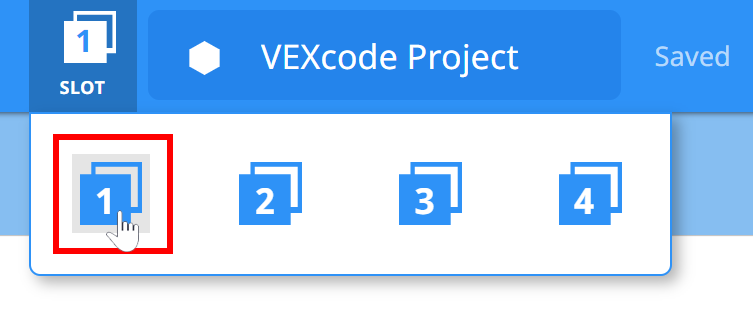
Kliknij ikonę Slotu. Możesz pobrać swój projekt do jednego z czterech dostępnych miejsc w Robot Brain. Kliknij cyfrę 1.
-
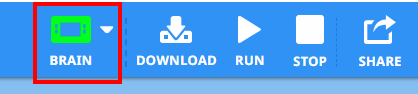
Programista powinien podłączyć robota do Twojego komputera lub tabletu. Po pomyślnym nawiązaniu połączenia ikona Brain na pasku narzędzi zmieni kolor na zielony.
-
Następnie kliknij przycisk Pobierz na pasku narzędzi, aby pobrać projekt Drive Velocity do Robot Brain.
-
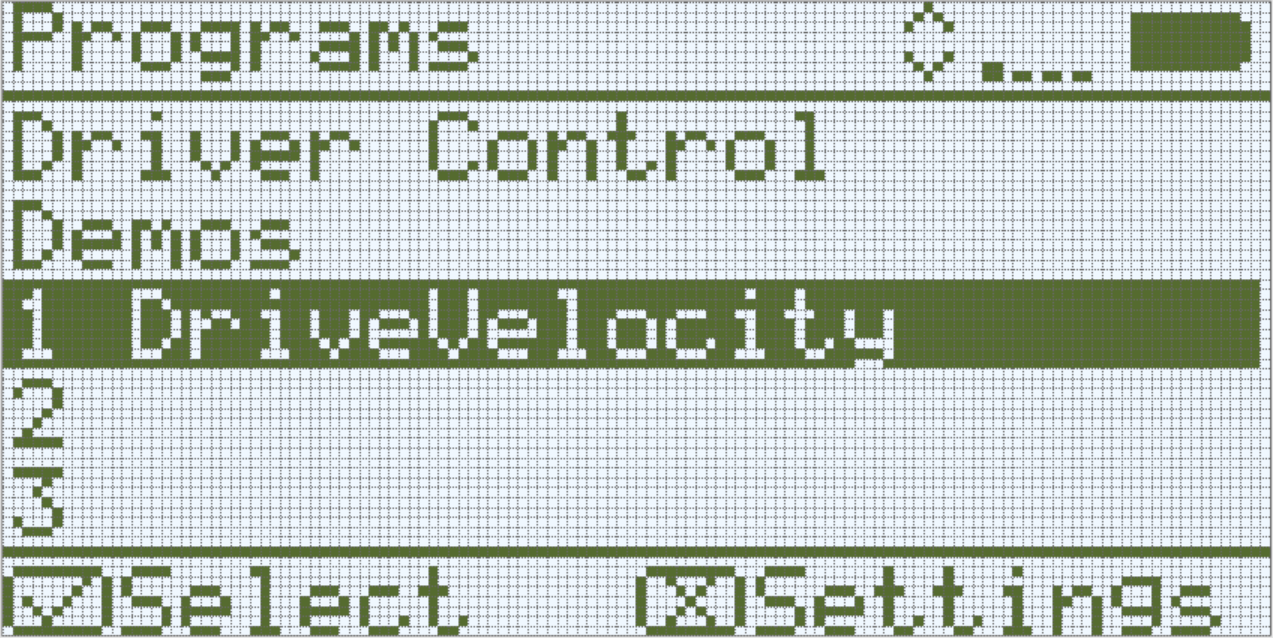
Operator powinien sprawdzić, czy projekt został pobrany do Brain Autopilota, patrząc na ekran Robot Brain. Nazwa projektu powinna być wymieniona w polu 1.
-
Kierowca powinien teraz uruchomić projekt na robocie Autopilot upewniając się, że projekt jest podświetlony, a następnie wcisnąć przycisk Sprawdź.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
-
Zatrzymaj się i omów
Poproś uczniów, aby przewidzieli, co ich zdaniem się stanie, gdy projekt zostanie pobrany i uruchomiony na robocie Autopilot. Powiedz uczniom, aby zapisali swoje przewidywania w zeszytach inżynierskich. Jeśli czas na to pozwala, poproś każdą grupę o podzielenie się swoją prognozą.Uczniowie powinni przewidzieć, że Autopilot najpierw będzie poruszać się do przodu ze swoją domyślną prędkością (50%), następnie wolniej (25%) niż domyślna prędkość, a następnie szybciej (75%) niż domyślna prędkość.
-
Model First
Modeluj prowadzenie projektu przed klasą, zanim wszyscy uczniowie spróbują jednocześnie. Zbierz uczniów w jednym miejscu i zostaw wystarczająco dużo miejsca, aby autopilot mógł przesunąć się o 15 cali, jeśli jest umieszczony na podłodze.Powiedz uczniom, że teraz ich kolej na realizację projektu. Upewnij się, że mają wolną drogę i że żaden Autopilot nie wpadnie na siebie.
Krok 3: Jedź do przodu i do tyłu z różnymi prędkościami
-
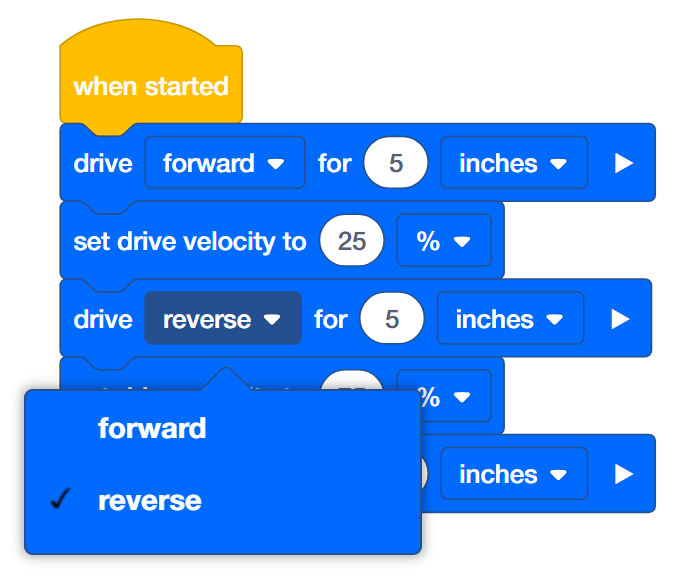
Programista powinien zmienić drugi napęd na blok, aby jechał do tyłu zamiast do przodu.
-
Programista powinien następnie pobrać projekt.
-
Kierowca powinien teraz uruchomić projekt na robocie Autopilot upewniając się, że projekt jest podświetlony i naciskając przycisk Sprawdź.
![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 3
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 3
-
Nie ma potrzeby ponownego zapisywania projektu, ponieważ VEXcode IQ dokona automatycznego zapisu.
-
Aby zmienić blok [drive for] z do przodu do do tyłu, po prostu kliknij menu rozwijane i wybierz do tyłu.
-
Jeśli uczniowie korzystają z komputera, przypomnij im, aby przed uruchomieniem programu odłączyli kabel USB od Robot Brain.
-
Ponieważ nie wybieramy nowego slotu, nowy program zostanie pobrany do Slotu 1 i zastąpi poprzedni program.