
Verkenning van de snelheid - Deel 2
Stap 1: Voeg een connectorpin toe aan de wielnaaf.

- De Builder moet een 1x1 Connector Pin toevoegen aan een van de wielnaven, zodat u gemakkelijk kunt zien hoe snel de motor en het wiel draaien.
![]() Teacher Toolbox
Teacher Toolbox
Wijs erop dat er zich in het programmeergebied standaard al een {when started} blok bevindt. Elk programma begint met dit blok. Wanneer het programma wordt gestart, worden de aangesloten blokken gevolgd in de volgorde waarin ze zijn geplaatst.
Demonstreer het klikken op het [station] -blok en sleep het naar het programmeergebied en verbind het met het {when started} blok. U hoort een klik wanneer deze wordt bevestigd.
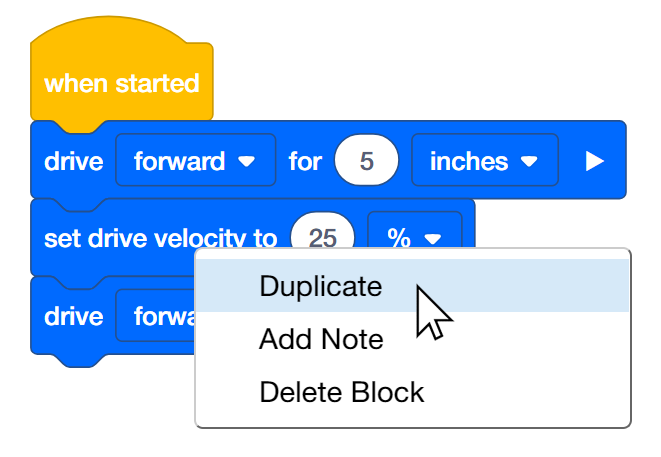
Het tweede en derde blok zijn hetzelfde als het vierde en vijfde blok. Na het toevoegen van het derde blok kan de programmeur met de rechtermuisknop of lang op het tweede blok klikken en Dupliceren kiezen om het vierde en vijfde blok toe te voegen. Dan kan de snelheid van het vierde blok gewijzigd worden naar 75%.
Stap 2: Rij 15 inch vooruit met verschillende snelheden
-
De programmeur moet dit project bouwen in VEXcode IQ.
-
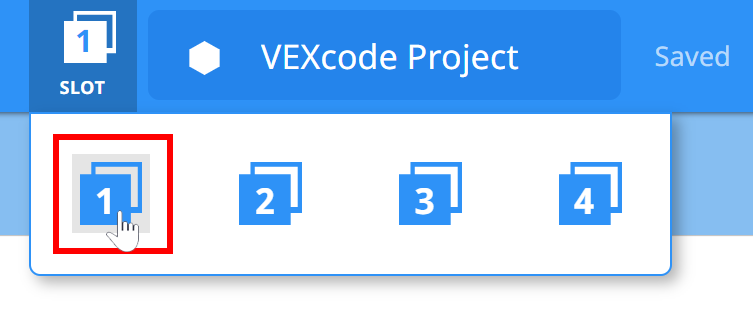
Klik op het Slot-pictogram. U kunt uw project downloaden naar een van de vier beschikbare slots in de Robot Brain. Klik op het nummer 1.
-
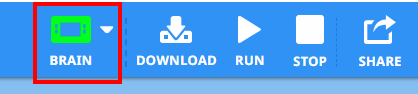
De programmeur moet de robot op uw computer of tablet aansluiten. Het Hersenen-pictogram in de werkbalk wordt groen zodra een succesvolle verbinding is gemaakt.
-
Klik vervolgens op de knop Downloaden op de werkbalk om het Drive Velocity-project naar het robotbrein te downloaden.
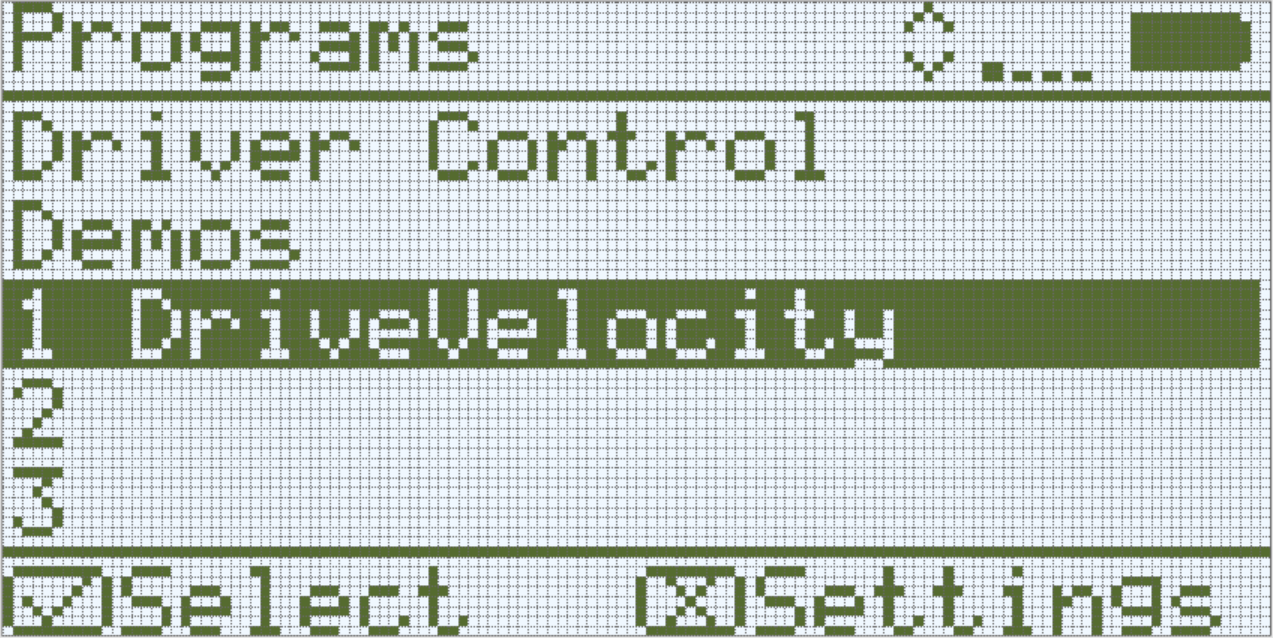
- De operator moet controleren of uw project is gedownload naar het brein van de automatische piloot door naar het scherm van het robotbrein te kijken. De projectnaam moet worden vermeld in sleuf 1.
- De chauffeur moet nu het project uitvoeren op de Autopilot-robot door ervoor te zorgen dat het project is gemarkeerd en vervolgens op de knop Controleren te drukken.
![]() Teacher Toolbox
Teacher Toolbox
-
Stop en bespreek
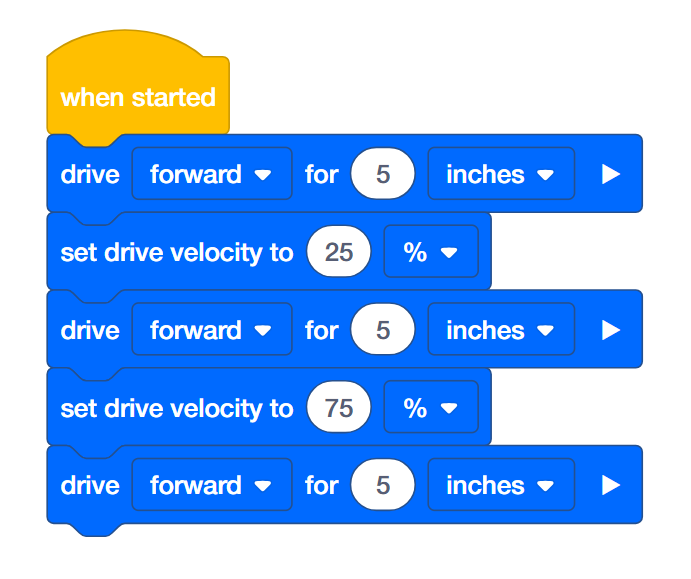
Vraag de studenten om te voorspellen wat er volgens hen zal gebeuren wanneer dit project wordt gedownload en op de Autopilot-robot wordt uitgevoerd. Vertel de leerlingen om hun voorspellingen op te nemen in hun technische notitieblokken. Als de tijd het toelaat, vraag dan elke groep om hun voorspelling te delen.Studenten moeten voorspellen dat de Autopilot eerst met de standaardsnelheid (50%) vooruitgaat, dan langzamer (25%) dan de standaardsnelheid en dan sneller (75%) dan de standaardsnelheid.
-
Model First
Model voert het project voor de klas uit voordat alle studenten het in één keer proberen. Verzamel de studenten in één ruimte en laat voldoende ruimte over voor de Autopilot om 15 inch te bewegen als deze op de vloer wordt geplaatst.Vertel de studenten dat het nu hun beurt is om hun project uit te voeren. Zorg ervoor dat ze een duidelijk pad hebben en dat er geen Autopilots tegen elkaar aanlopen.
Stap 3: Rij vooruit en achteruit met verschillende snelheden
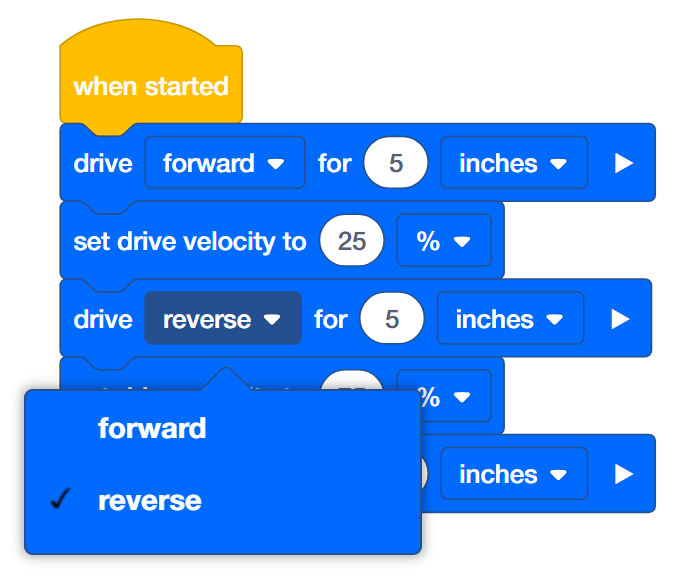
- De programmeur moet de tweede aandrijving voor het blok veranderen om achteruit te rijden in plaats van vooruit.
- De programmeur moet dan het project downloaden.
- De chauffeur moet nu het project uitvoeren op de Autopilot-robot door ervoor te zorgen dat het project is gemarkeerd en op de knop Controleren te drukken.
![]() Teacher Toolbox
- Stap 3
voltooien
Teacher Toolbox
- Stap 3
voltooien
-
Het is niet nodig om het project opnieuw op te slaan, omdat VEXcode IQ automatisch wordt opgeslagen.
-
Om het blok [drive for] van vooruit naar achteruit te wijzigen, klikt u op het vervolgkeuzemenu en selecteert u achteruit.
-
Als de leerlingen een computer gebruiken, herinner hen er dan aan om de USB-kabel van Robot Brain los te koppelen voordat het programma wordt uitgevoerd.
-
Omdat we geen nieuwe sleuf selecteren, wordt het nieuwe programma gedownload naar sleuf 1 en wordt het vorige programma vervangen.