
1. darbība: pievienojiet savienotāja tapu riteņa rumbai.

-
Būvniekam ir jāpievieno 1x1 savienotāja tapa vienai no riteņu rumbām, lai jūs varētu viegli redzēt, cik ātri motors un ritenis griežas.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
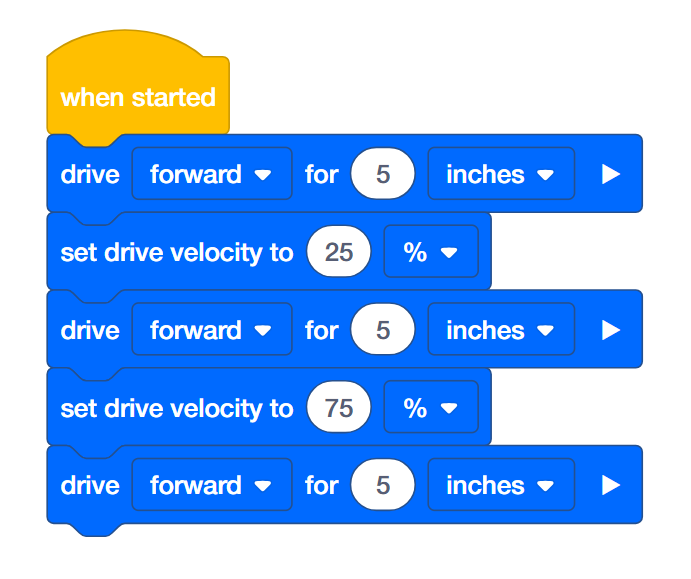
Norādiet, ka programmēšanas apgabalā pēc noklusējuma jau ir {when started} bloks. Katra programma sāksies ar šo bloku. Kad programma tiek startēta, savienotajiem blokiem tiks sekots secībā, kādā tie ir ievietoti.
Demonstrējiet noklikšķināšanu uz [drive] bloka un velciet to uz programmēšanas apgabalu, savienojot to ar {when started} bloku. Kad tas tiks piestiprināts, jūs dzirdēsit klikšķi.
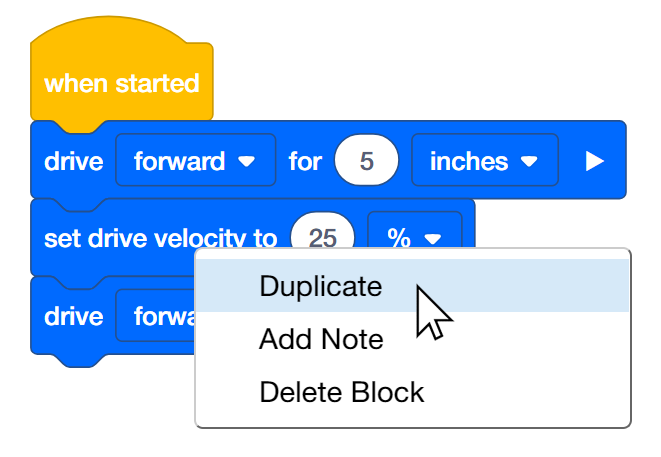
Otrais un trešais bloks ir tāds pats kā ceturtais un piektais bloks. Pēc trešā bloka pievienošanas programmētājs var ar peles labo pogu vai ilgi noklikšķināt uz otrā bloka un izvēlēties Duplicate, lai pievienotu ceturto un piekto bloku. Tad ceturtā bloka ātrumu var mainīt uz 75%.
2. darbība. Brauciet uz priekšu 15 collas dažādos ātrumos
-
Programmētājam šis projekts jāveido VEXcode IQ.
-
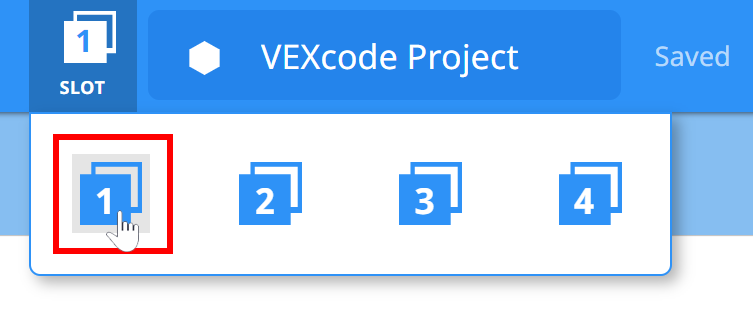
Noklikšķiniet uz slota ikonas. Jūs varat lejupielādēt savu projektu vienā no četriem pieejamajiem Robot Brain slotiem. Noklikšķiniet uz skaitļa 1.
-
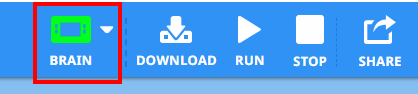
Programmētājam jāpievieno robots jūsu datoram vai planšetdatoram. Smadzeņu ikona rīkjoslā kļūst zaļa, tiklīdz ir izveidots veiksmīgs savienojums.
-
Pēc tam rīkjoslā noklikšķiniet uz pogas Lejupielādēt, lai lejupielādētu projektu Drive Velocity rīkā Robot Brain.
-
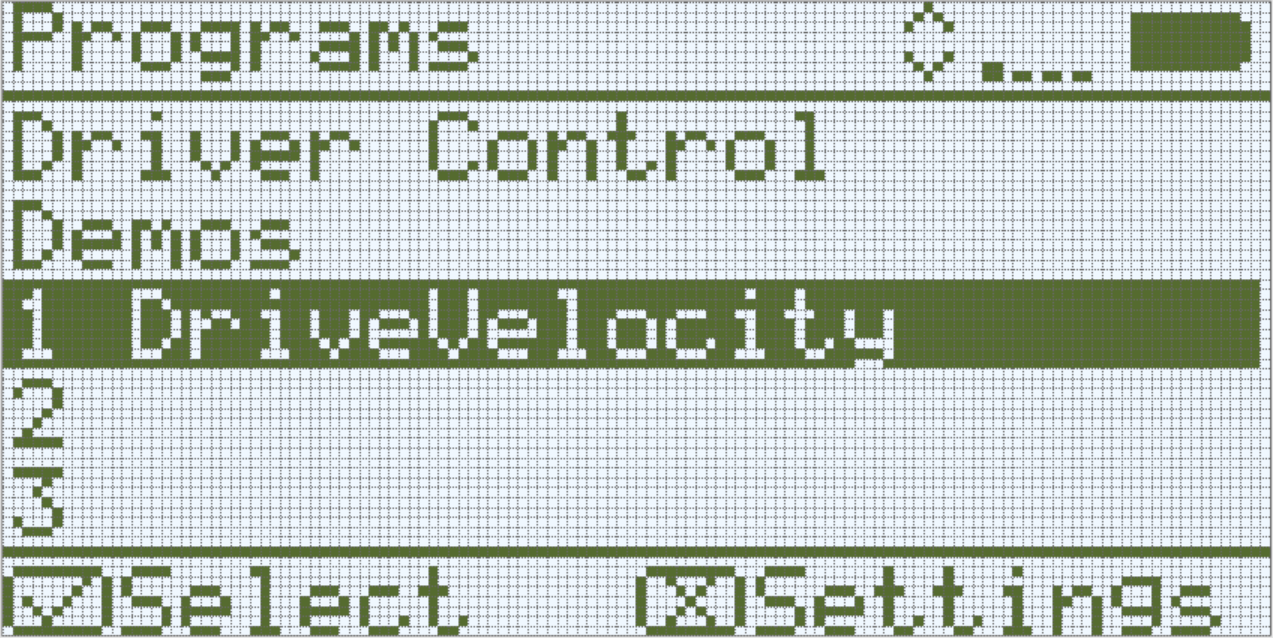
Operatoram ir jāpārbauda, vai jūsu projekts ir lejupielādēts Autopilota smadzenēs, apskatot robota smadzeņu ekrānu. Projekta nosaukums ir jānorāda 1. vietā.
-
Vadītājam tagad ir jāpalaiž projekts ar Autopilota robotu, pārliecinoties, ka projekts ir iezīmēts, un pēc tam nospiediet pogu Pārbaudīt.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Apstāties un apspriest
Palūdziet studentiem paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists ar Autopilota robotu. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.Studentiem jāparedz, ka Autopilots vispirms virzīsies uz priekšu ar noklusējuma ātrumu (50%), pēc tam lēnāk (25%) nekā noklusējuma ātrums un pēc tam ātrāk (75%) par noklusējuma ātrumu.
-
Vispirms modelis
Modelējiet projektu klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas, lai Autopilots varētu pārvietoties par 15 collas, ja tas ir novietots uz grīdas.Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens autopilots nesaskrienas.
3. darbība: brauciet uz priekšu un atpakaļgaitā dažādos ātrumos
-
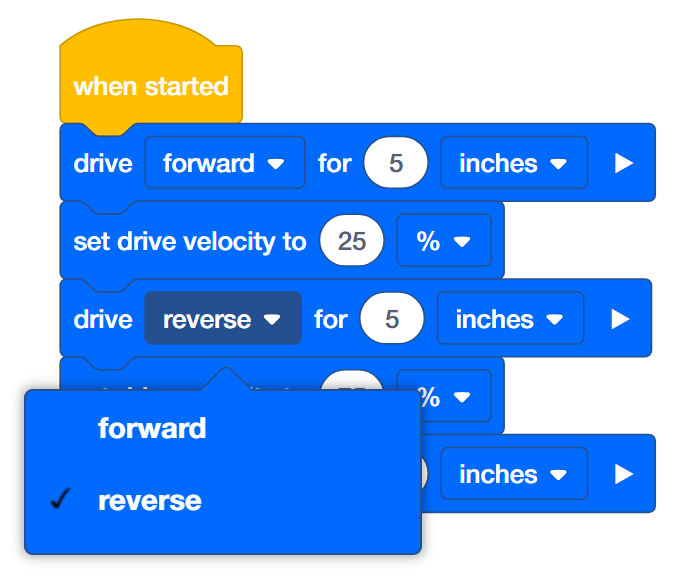
Programmētājam ir jāmaina otrais disks pret bloku, lai brauktu atpakaļgaitā, nevis uz priekšu.
-
Programmētājam vajadzētu lejupielādēt projektu.
-
Vadītājam tagad jāpalaiž projekts ar Autopilota robotu, pārliecinoties, ka projekts ir iezīmēts, un nospiežot pogu Pārbaudīt.
![]() Skolotāja rīkkopa
darbības pabeigšana
Skolotāja rīkkopa
darbības pabeigšana
-
Nav nepieciešams vēlreiz saglabāt projektu, jo VEXcode IQ tiks saglabāts automātiski.
-
Lai mainītu [drive for] bloku no uz priekšu uz reverse, vienkārši noklikšķiniet uz nolaižamās izvēlnes un atlasiet atpakaļgaitā.
-
Ja skolēni izmanto datoru, atgādiniet viņiem pirms programmas palaišanas atvienot USB kabeli no Robot Brain.
-
Tā kā mēs neizvēlamies jaunu slotu, jaunā programma tiks lejupielādēta 1. vietā un aizstās iepriekšējo programmu.