
Esplorazione della velocità - Parte 2
Passaggio 1: aggiungere un perno di connessione al mozzo della ruota.

- Il Costruttore dovrebbe aggiungere un perno di connessione 1x1 a uno dei mozzi delle ruote in modo da poter vedere facilmente la velocità di rotazione del motore e della ruota.
![]() Cassetta degli attrezzi per insegnanti
Cassetta degli attrezzi per insegnanti
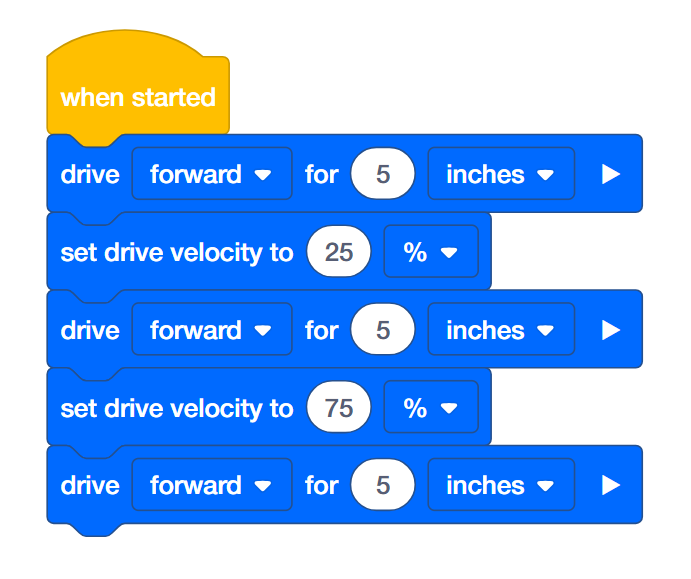
Fai notare che nell'area di programmazione c'è già un {when started} blocco che si trova
lì per impostazione predefinita. Ogni programma inizierà con questo blocco. Quando il
programma viene avviato, i blocchi collegati verranno seguiti nella sequenza in cui sono
posizionati.
Dimostrare cliccando sul blocco [drive] e trascinandolo nell'area di
programmazione, collegandolo al {when started} blocco. Si sentirà un clic quando si
attacca.
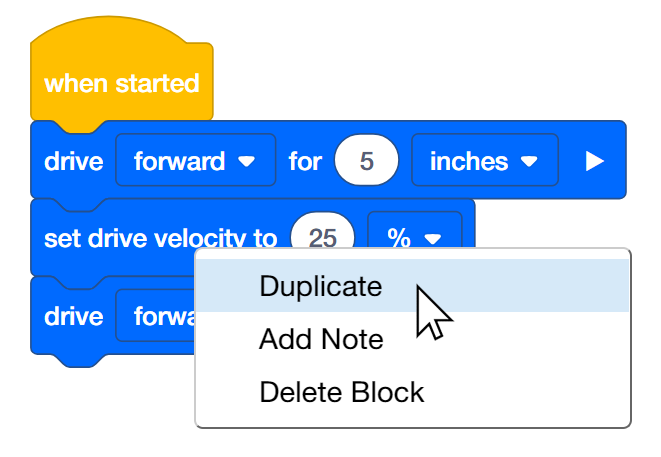
Il secondo e il terzo blocco sono gli stessi del quarto e del quinto
blocco. Dopo aver aggiunto il terzo blocco, il programmatore può fare clic destro o
lungo sul secondo blocco e scegliere Duplica per aggiungere il quarto e il quinto
blocco. Quindi la velocità del quarto blocco può essere modificata al 75%.
Passo 2: Guidare in avanti per 15 pollici a velocità diverse
-
Il programmatore deve costruire questo progetto in VEXcode IQ.
-
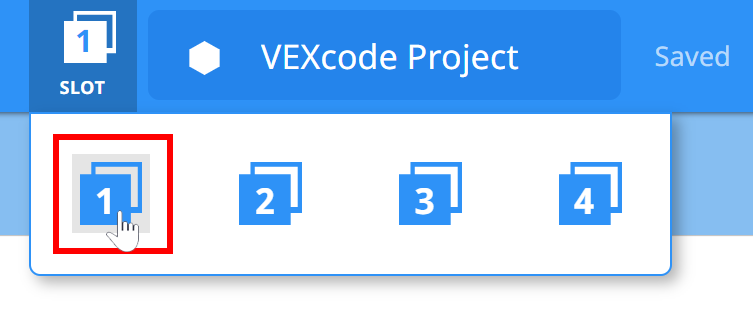
Clicca sull'icona Slot. Puoi scaricare il tuo progetto in uno dei quattro slot disponibili nel Robot Brain. Clicca sul numero 1.
-
Il programmatore deve collegare il robot al computer o al tablet. L'icona Cervello nella barra degli strumenti diventa verde una volta stabilita una connessione.
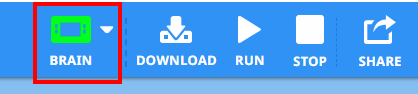
-
Quindi, fai clic sul pulsante Download sulla barra degli strumenti per scaricare il progetto Drive Velocity nel cervello del robot.
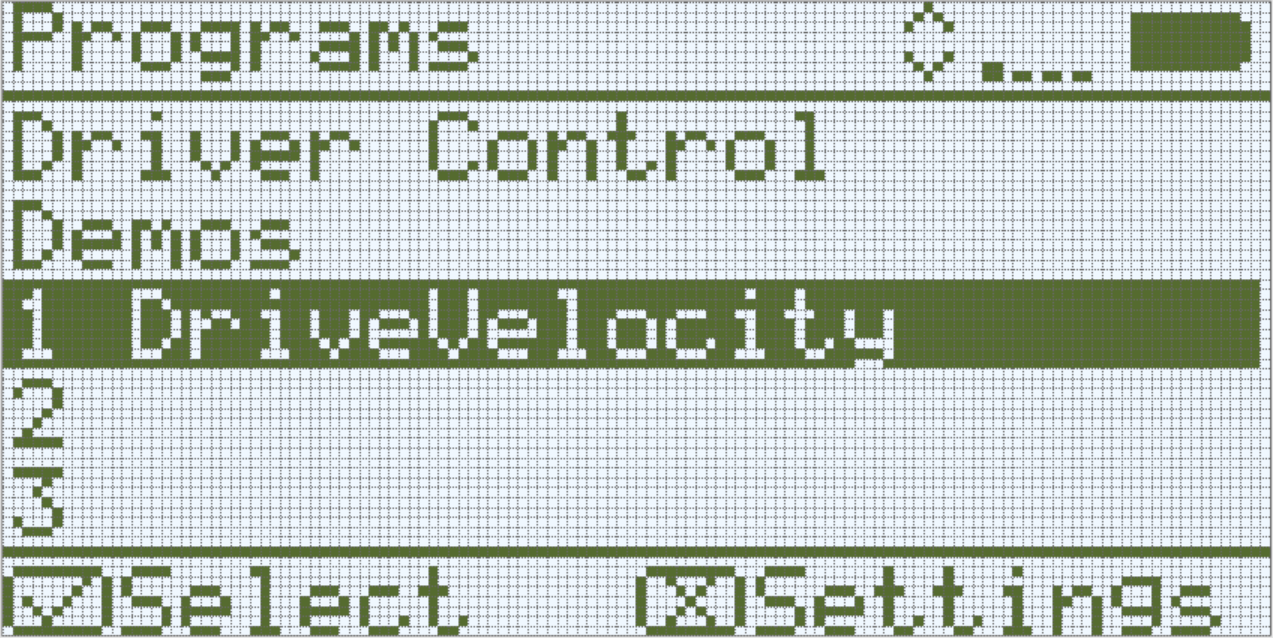
- L'operatore deve verificare che il progetto sia stato scaricato nel cervello del pilota automatico guardando lo schermo del cervello del robot. Il nome del progetto deve essere elencato nello slot 1.
- Il Driver dovrebbe ora eseguire il progetto sul robot Autopilot assicurandosi che il progetto sia evidenziato e quindi premere il pulsante Check.
![]() Cassetta degli attrezzi per insegnanti
Cassetta degli attrezzi per insegnanti
-
Fermati e discuti
Chiedi agli studenti di prevedere cosa pensano che accadrà quando questo progetto verrà scaricato ed eseguito sul robot Autopilot. Chiedi agli studenti di registrare le loro previsioni nei loro quaderni di ingegneria. Se il tempo lo consente, chiedi a ciascun gruppo di condividere la propria previsione.Gli studenti dovrebbero prevedere che il pilota automatico avanzerà prima alla sua velocità predefinita (50%), poi più lentamente (25%) rispetto alla velocità predefinita e quindi più velocemente (75%) rispetto alla velocità predefinita.
-
Model First
Model che esegue il progetto di fronte alla classe prima di far provare tutti gli studenti contemporaneamente. Riunisci gli studenti in un'area e lascia spazio sufficiente affinché il pilota automatico si muova di 15 pollici se è posizionato sul pavimento.Di 'agli studenti che ora è il loro turno di gestire il loro progetto. Assicurati che abbiano un percorso chiaro e che nessun pilota automatico si incontri.
Passaggio 3: Guida in avanti e in retromarcia a velocità diverse
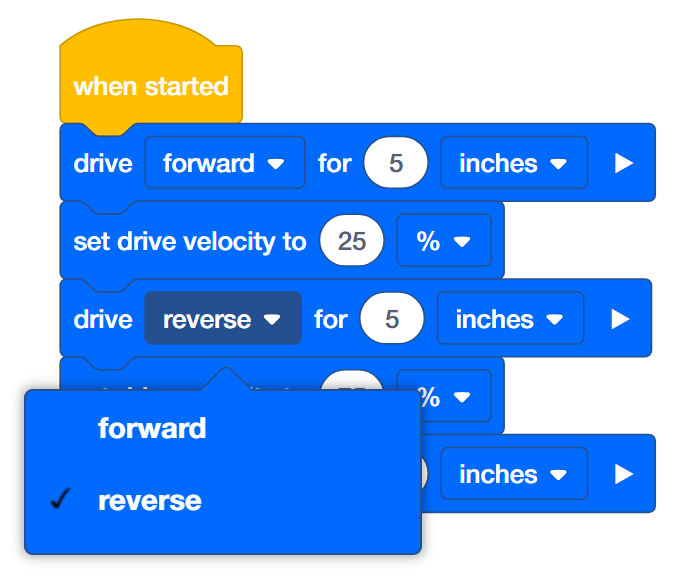
- Il programmatore deve cambiare la seconda unità per il blocco per guidare in retromarcia invece che in avanti.
- Il programmatore dovrebbe quindi scaricare il progetto.
- Il Driver dovrebbe ora eseguire il progetto sul robot Autopilot assicurandosi che il progetto sia evidenziato e premendo il pulsante Check.
![]() Cassetta degli attrezzi per insegnanti
-
Completamento del passaggio 3
Cassetta degli attrezzi per insegnanti
-
Completamento del passaggio 3
-
Non è necessario salvare nuovamente il progetto perché VEXcode IQ eseguirà il salvataggio automatico.
-
Per cambiare il blocco [drive for] da avanti a indietro, è sufficiente fare clic sul menu a discesa e selezionare indietro.
-
Se gli studenti utilizzano un computer, ricordare loro di scollegare il cavo USB da Robot Brain prima di eseguire il programma.
-
Poiché non stiamo selezionando un nuovo slot, il nuovo programma verrà scaricato nello slot 1 e sostituirà il programma precedente.