
第 1 步:将连接器引脚添加到轮毂上。

-
构建者应在其中一个轮毂上添加一个 1x1 连接器引脚,以便您可以轻松地看到电机和车轮的转动速度。
![]() 教师工具箱
教师工具箱
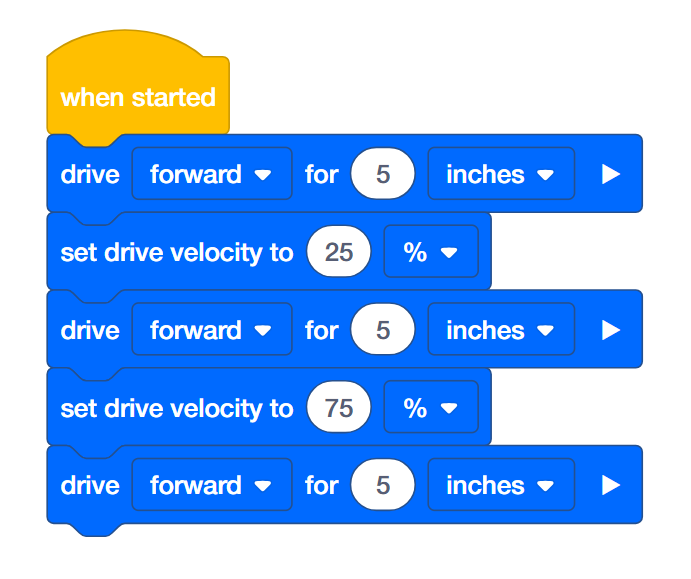
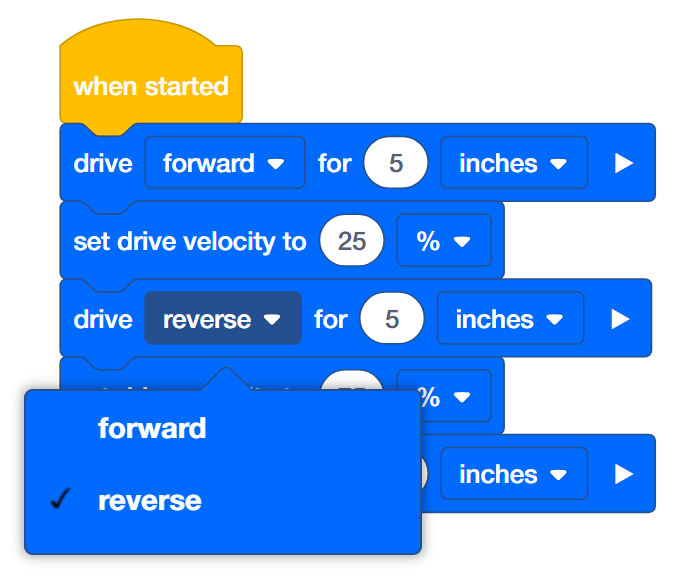
指出在编程区域中,默认已经有一个 {when started} 块位于那里。 每个程序都将从该块开始。 当程序启动时,连接的块将按照它们放置的顺序进行。
演示单击[驱动]块并将其拖到编程区域,并将其连接到 {when started} 块。 连接时您会听到咔哒声。
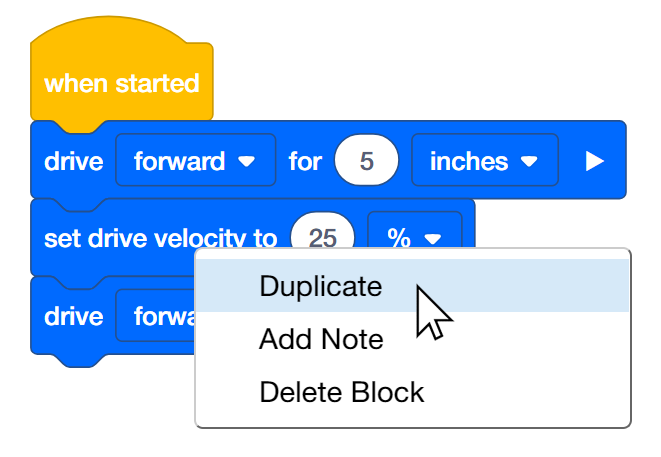
第二和第三块与第四和第五块相同。 添加第三个块后,程序员可以右键或长按第二个块并选择“复制”以添加第四个和第五个块。 然后第四块的速度可以改为75%。
第 2 步:以不同速度向前行驶 15 英寸
-
程序员应在 VEXcode IQ 中构建此项目。
-
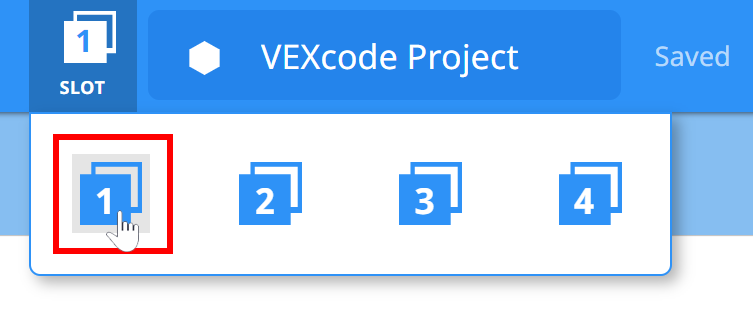
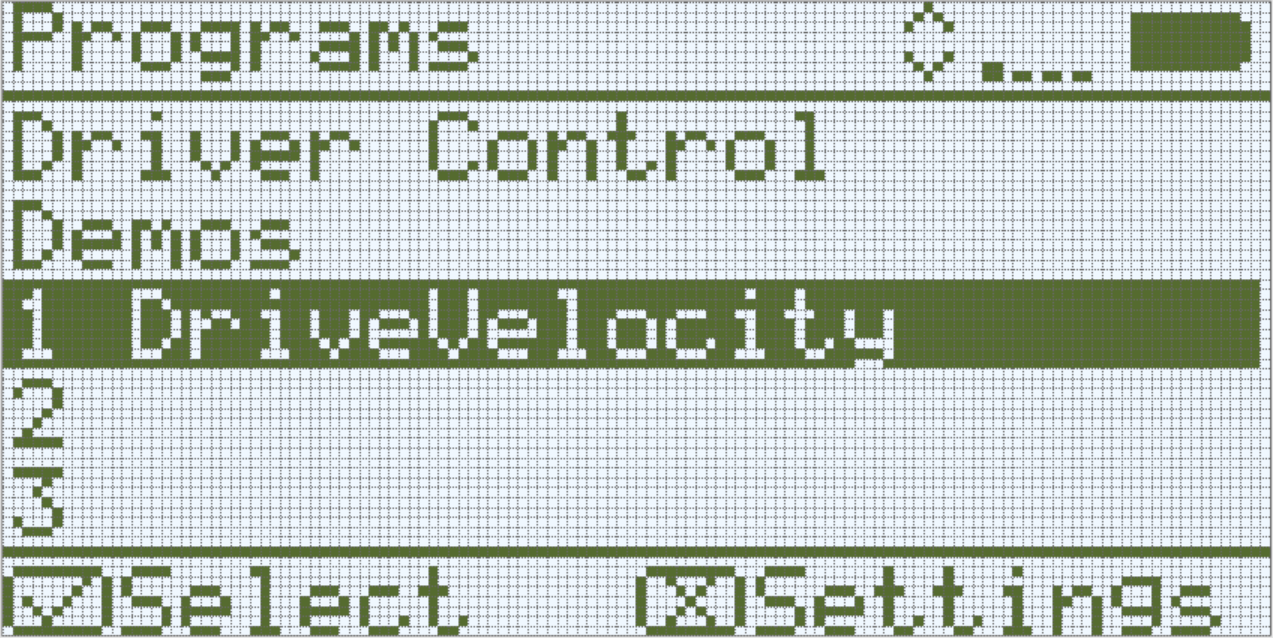
单击插槽图标。 您可以将项目下载到机器人大脑中的四个可用插槽之一。 单击数字 1。
-
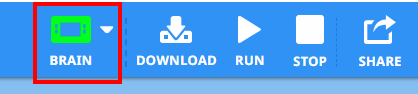
程序员应将机器人连接到您的计算机或平板电脑。 成功连接后,工具栏中的“大脑”图标将变为绿色。
-
然后,单击工具栏上的下载按钮将 Drive Velocity 项目下载到机器人大脑。
-
操作员应通过查看机器人大脑的屏幕来检查以确保您的项目已下载到自动驾驶仪的大脑。 项目名称应列在槽 1 中。
-
驱动程序现在应该在 Autopilot 机器人上运行该项目,确保该项目突出显示,然后按“检查”按钮。
![]() 教师工具箱
教师工具箱
-
停下来讨论
让学生预测当这个项目下载并在自动驾驶机器人上运行时会发生什么。 告诉学生在工程笔记本上记录他们的预测。 如果时间允许,请每个小组分享他们的预测。学生应预测自动驾驶仪将首先以其默认速度 (50%) 向前移动,然后比默认速度慢 (25%),然后比默认速度快 (75%)。
-
示范 首先
示范在全班同学面前运行该项目,然后让所有学生同时尝试。 将学生聚集在一个区域,并留出足够的空间,以便 Autopilot 移动 15 英寸(如果将其放置在地板上)。告诉学生现在轮到他们来运行他们的项目了。 确保它们有畅通的路径,并且自动驾驶仪不会互相碰撞。
![]() 教师工具箱
-
完成第 3 步
教师工具箱
-
完成第 3 步
-
无需再次保存项目,因为 VEXcode IQ 会自动保存。
-
要将 [drive for] 块从 前进 更改为 后退,只需单击下拉菜单并选择 后退。
-
如果学生使用计算机,请提醒他们在运行程序之前断开与 Robot Brain 的 USB 电缆。
-
因为我们没有选择新的插槽,所以新程序将下载到插槽 1 并替换以前的程序。