
第 1 步:將連接器接腳加到輪轂上。

-
建造者應在其中一個輪轂上添加 1x1 連接器引腳,以便您可以輕鬆看到馬達和車輪的轉動速度。
![]() 教師工具箱
教師工具箱
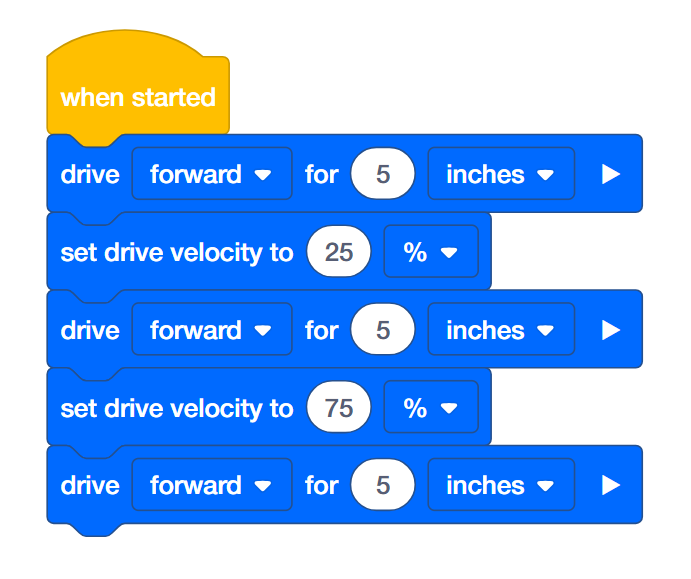
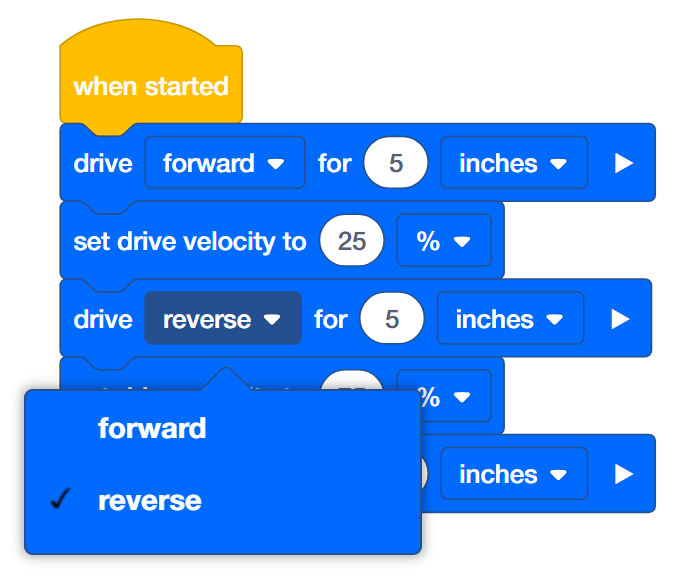
指出在程式區中,預設已經有一個 {when started} 塊位於該處。 每個程式都將從該區塊開始。 當程式啟動時,連接的區塊將按照它們放置的順序進行。
示範點擊 [drive] 區塊並將其拖曳到程式區域,將其連接到 {when started} 區塊。 連接時您會聽到咔噠聲。
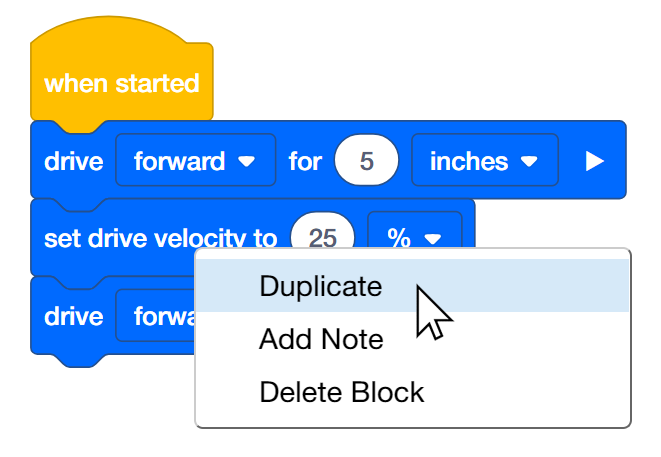
第二和第三塊與第四和第五塊相同。 新增第三個區塊後,程式設計師可以右鍵或長按第二個區塊並選擇「複製」以新增第四個和第五個區塊。 然後第四塊的速度可以改為75%。
步驟 2:以不同的速度向前行駛 15 英寸
-
程式設計師應在 VEXcode IQ 中建立此專案。
-
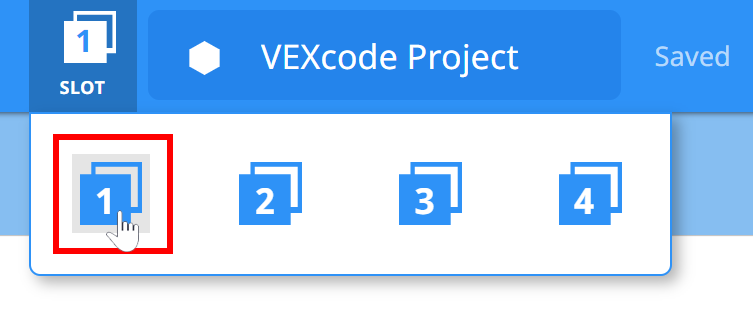
點擊插槽圖示。 您可以將專案下載到機器人大腦中的四個可用插槽之一。 點選數字 1。
-
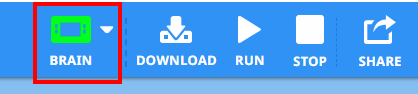
程式設計師應將機器人連接到您的電腦或平板電腦。 成功連接後,工具列中的「大腦」圖示將變為綠色。
-
然後,點擊工具列上的下載按鈕將 Drive Velocity 專案下載到機器人大腦。
-
操作員應透過查看機器人大腦的螢幕來檢查以確保您的專案已下載到自動駕駛儀的大腦。 項目名稱應列在槽 1 中。
-
驅動程式現在應該在 Autopilot 機器人上運行該項目,確保該項目突出顯示,然後按「檢查」按鈕。
![]() 教師工具箱
教師工具箱
-
停下來討論
請學生預測當專案下載並在 Autopilot 機器人上運行時他們認為會發生什麼。 告訴學生在工程筆記本上記錄他們的預測。 如果時間允許,請每組分享他們的預測。學生應預測自動駕駛儀將首先以其預設速度 (50%) 向前移動,然後比預設速度慢 (25%),然後比預設速度快 (75%)。
-
首先示範
在讓所有學生立即嘗試之前,在全班同學面前示範運行該計畫。 將學生聚集在一個區域,並留出足夠的空間,以便 Autopilot 移動 15 英吋(如果將其放置在地板上)。告訴學生現在輪到他們來運行他們的專案了。 確保它們有暢通的路徑,並且自動駕駛儀不會互相碰撞。
![]() 教師工具箱
-
完成步驟 3
教師工具箱
-
完成步驟 3
-
無需再次儲存項目,因為 VEXcode IQ 會自動儲存。
-
要將 [drive for] 區塊從 正向 變更為 反向,只需按一下下拉式選單並選擇 反向。
-
如果學生使用計算機,請提醒他們在運行程式之前斷開與 Robot Brain 的 USB 電纜。
-
因為我們沒有選擇新的插槽,所以新程式將下載到插槽 1 並取代先前的程式。