
Exploração da Velocidade - Parte 2
Etapa 1: Adicione um pino do conector ao cubo da roda.

- O Construtor deve adicionar um Pino do Conector 1x1 a um dos cubos das rodas para que você possa ver facilmente a velocidade com que o motor e a roda estão girando.
![]() Caixa de Ferramentas do Professor
Caixa de Ferramentas do Professor
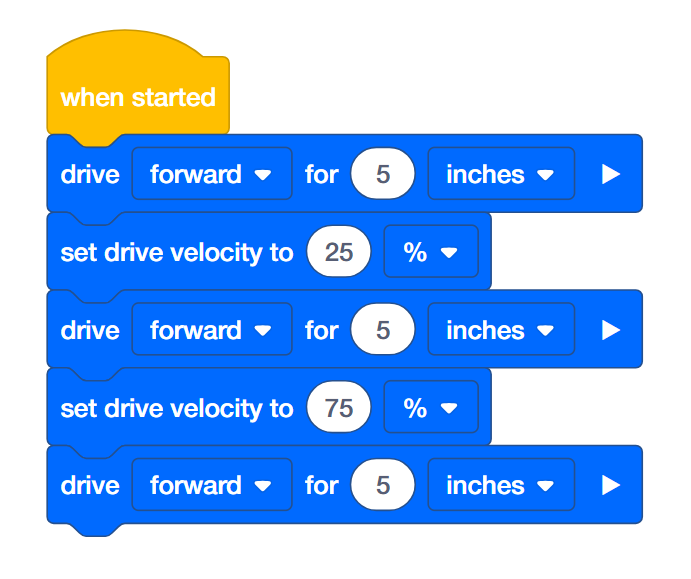
Ressaltar que na área de programação, já existe um {when started} bloco localizado ali por padrão. Cada programa começará com este bloco. Quando o programa é iniciado, os blocos conectados serão seguidos na sequência em que são colocados.
Demonstre clicando no bloco [drive] e arrastando-o para a área de programação, conectando-o ao {when started} bloco. Você ouvirá um clique quando ele for anexado.
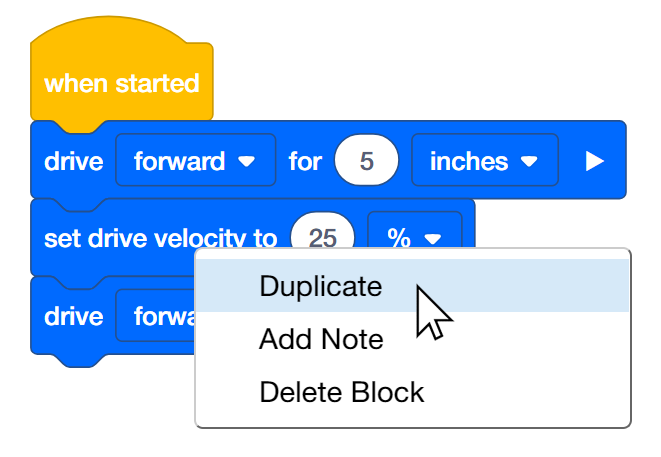
O segundo e o terceiro blocos são os mesmos que o quarto e o quinto blocos. Depois de adicionar o terceiro bloco, o Programador pode clicar com o botão direito ou longo no segundo bloco e escolher Duplicar para adicionar o quarto e o quinto blocos. Em seguida, a velocidade do quarto bloco pode ser alterada para 75%.
Etapa 2: Dirija para frente por 15 polegadas em diferentes velocidades
-
O Programador deve construir este projeto no VEXcode IQ.
-
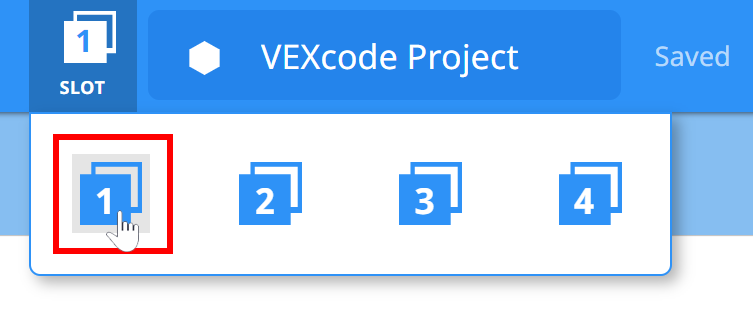
Clique no ícone Slot. Você pode baixar o seu projeto para um dos quatro slots disponíveis no Robot Brain. Clique no número 1.
-
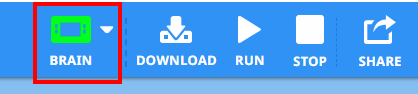
O Programador deve ligar o robô ao seu computador ou tablet. O ícone Cérebro na barra de ferramentas fica verde assim que uma conexão bem-sucedida for feita.
-
Em seguida, clique no botão Download na barra de ferramentas para baixar o projeto Drive Velocity para o Robot Brain.
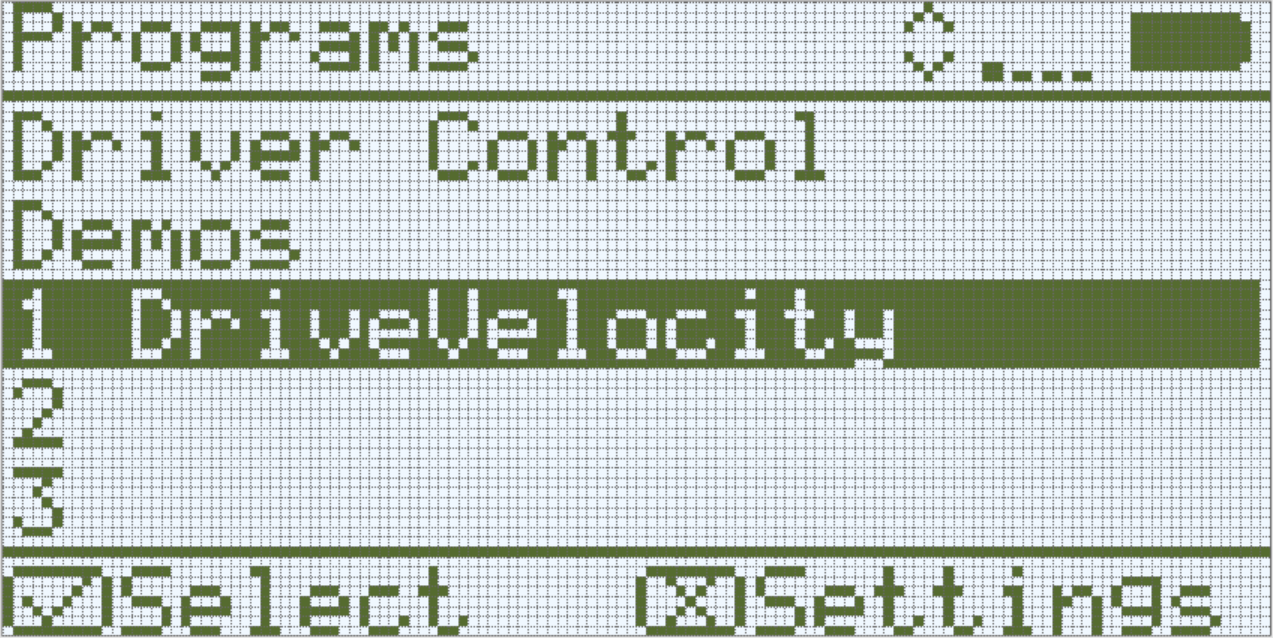
- O Operador deve verificar se o seu projeto foi baixado para o Cérebro do Piloto Automático, olhando para a tela do Cérebro do Robô. O nome do projeto deve ser listado no slot 1.
- O Condutor deve agora executar o projeto no robô do Piloto Automático, certificando-se de que o projeto esteja destacado e, em seguida, pressionar o botão Verificar.
![]() Caixa de Ferramentas do Professor
Caixa de Ferramentas do Professor
-
Pare e discuta
Peça aos alunos que prevejam o que eles acham que acontecerá quando este projeto for baixado e executado no robô Piloto Automático. Diga aos alunos para registarem as suas previsões nos seus cadernos de engenharia. Se o tempo permitir, peça a cada grupo que compartilhe sua previsão.Os alunos devem prever que o Piloto Automático primeiro avançará em sua velocidade padrão (50%), depois mais lento (25%) do que a velocidade padrão e, em seguida, mais rápido (75%) do que a velocidade padrão.
-
Modelo Primeiro
Modelo executando o projeto na frente da turma antes de fazer com que todos os alunos tentem de uma só vez. Reúna os alunos em uma área e deixe espaço suficiente para que o piloto automático se mova 15 polegadas se for colocado no chão.Diga aos alunos que agora é a vez deles executarem o projeto. Certifique-se de que eles tenham um caminho claro e que nenhum piloto automático se encontre.
Etapa 3: Dirija para frente e para trás em diferentes velocidades
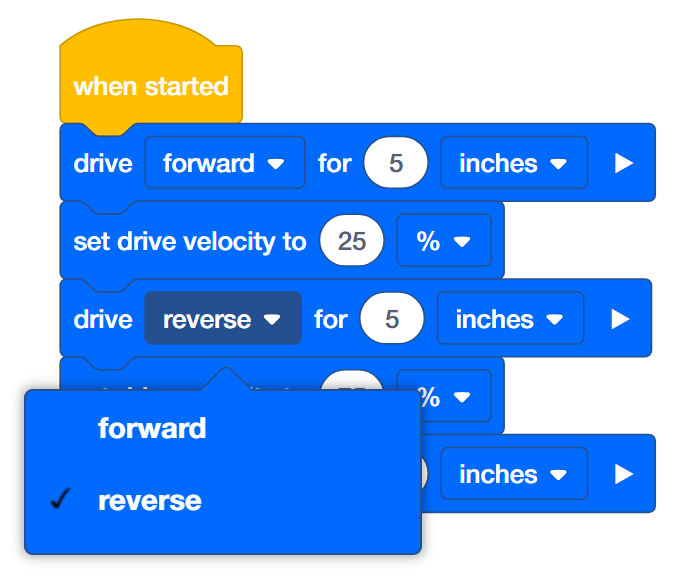
- O Programador deve mudar a segunda unidade para que o bloco conduza em marcha à ré em vez de para frente.
- O Programador deve então baixar o projeto.
- O Condutor deve agora executar o projeto no robô do Piloto Automático, certificando-se de que o projeto esteja destacado e pressionando o botão Verificar.
![]() Caixa de Ferramentas do Professor
-
Concluindo a Etapa 3
Caixa de Ferramentas do Professor
-
Concluindo a Etapa 3
-
Não há necessidade de salvar o projeto novamente porque o VEXcode IQ será salvo automaticamente.
-
Para alterar o bloco [drive for] de forward para reverse, basta clicar no menu suspenso e selecionar reverse.
-
Se os alunos estiverem usando um computador, lembre-os de desconectar o cabo USB do Robot Brain antes de executar o programa.
-
Como não estamos a selecionar uma nova ranhura, o novo programa será transferido para a ranhura 1 e substituirá o programa anterior.