
Vaihe 1: Lisää liitintappi pyörän napaan.

-
Rakentajan tulee lisätä 1x1 liitintappi yhteen pyörän navoista, jotta voit helposti nähdä kuinka nopeasti moottori ja pyörä pyörivät.
![]() Opettajan työkalupakki
Opettajan työkalupakki
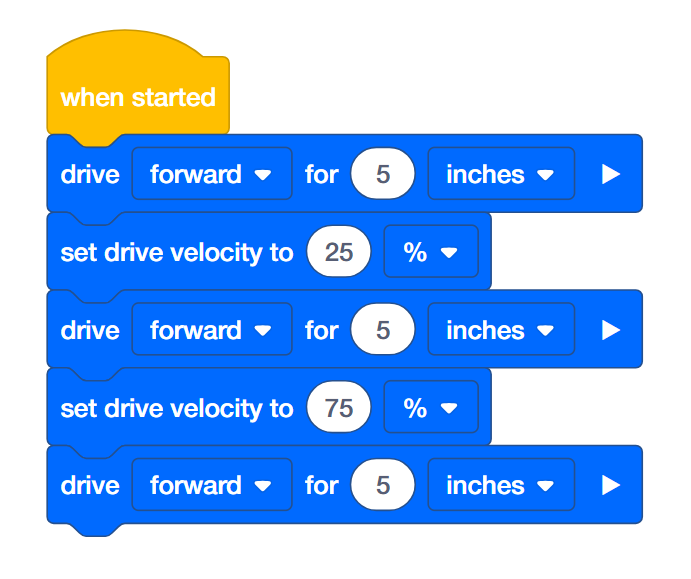
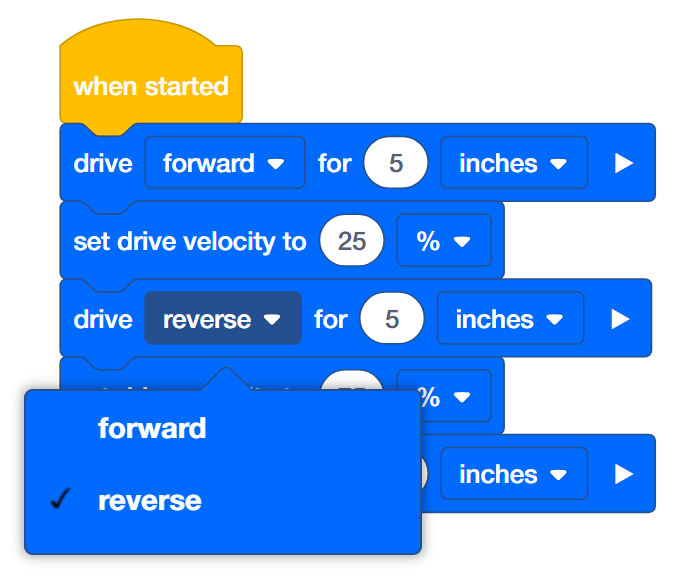
Huomaa, että ohjelmointialueella on jo oletusarvoisesti {when started} lohko. Jokainen ohjelma alkaa tällä lohkolla. Kun ohjelma käynnistetään, yhdistettyjä lohkoja seurataan siinä järjestyksessä, johon ne on sijoitettu.
Osoita napsauttamalla [drive]-lohkoa ja vetämällä se ohjelmointialueelle yhdistämällä se {when started} lohkoon. Kuulet napsahduksen, kun se kiinnittyy.
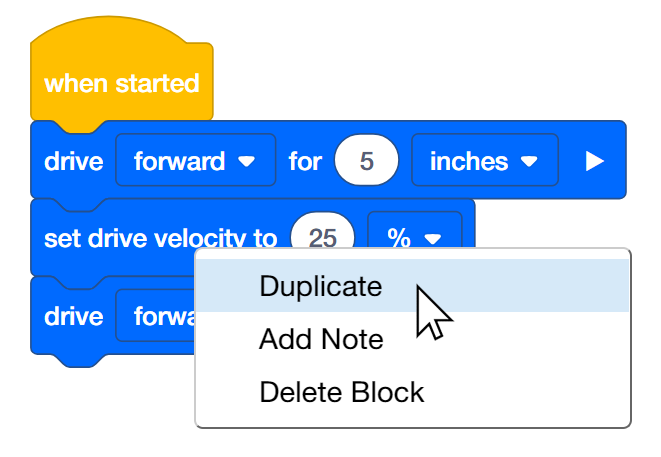
Toinen ja kolmas lohko ovat samat kuin neljäs ja viides lohko. Kun olet lisännyt kolmannen lohkon, ohjelmoija voi napsauttaa hiiren kakkospainikkeella tai pitkään toista lohkoa ja lisätä neljännen ja viidennen lohkon valitsemalla Kopioi. Sitten neljännen lohkon nopeus voidaan muuttaa 75 prosenttiin.
Vaihe 2: Aja eteenpäin 15 tuumaa eri nopeuksilla
-
Ohjelmoijan tulee rakentaa tämä projekti VEXcode IQ:lla.
-
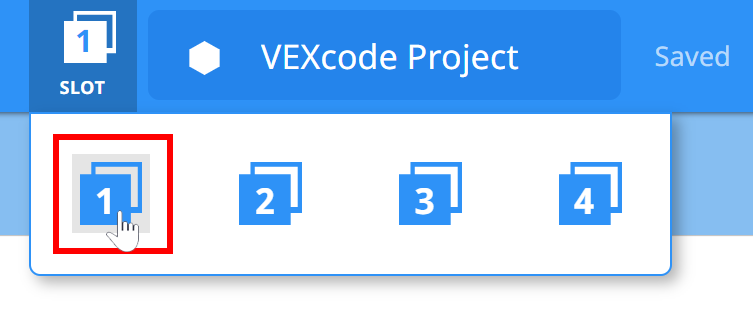
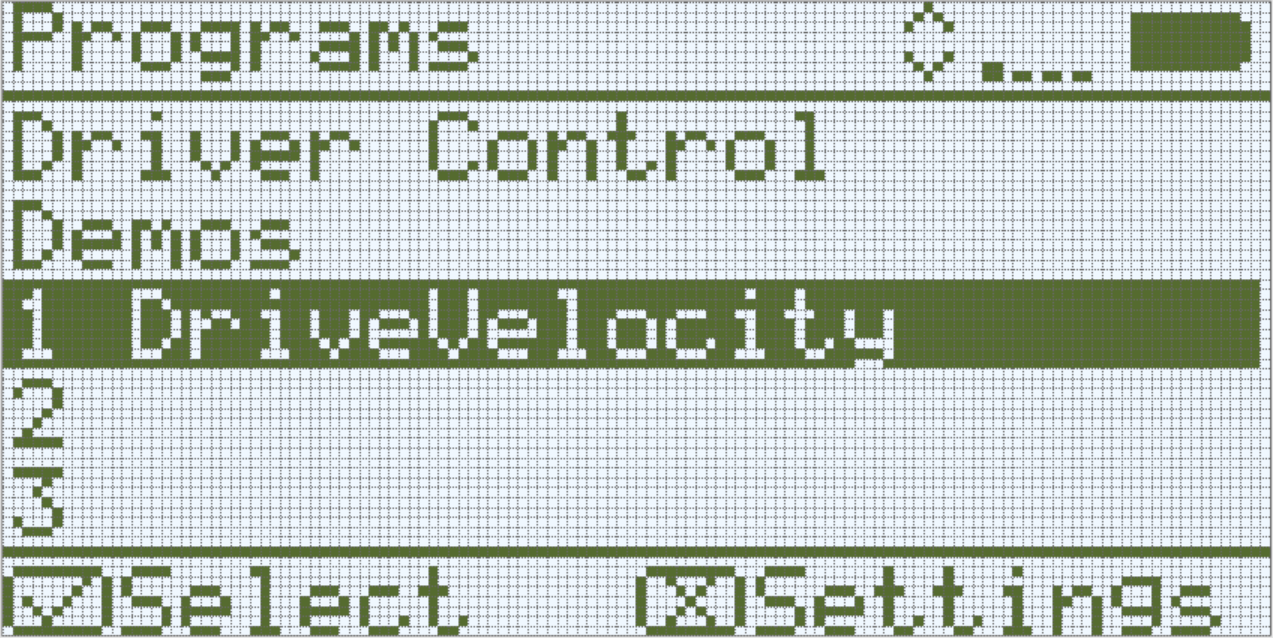
Napsauta Slot-kuvaketta. Voit ladata projektisi johonkin neljästä Robot Brainin käytettävissä olevasta paikasta. Napsauta numeroa 1.
-
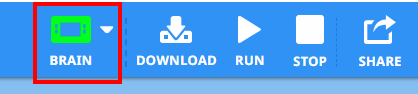
Ohjelmoijan tulee liittää robotti tietokoneeseen tai tablettiin. Työkalurivin Brain-kuvake muuttuu vihreäksi, kun yhteys on muodostettu.
-
Napsauta sitten työkalupalkin Lataa-painiketta ladataksesi Drive Velocity -projektin Robot Brainiin.
-
Käyttäjän tulee tarkistaa Robot Brainin näyttöä katsomalla, että projektisi on ladattu Autopilotin aivoihin. Projektin nimi tulee olla kohdassa 1.
-
Kuljettajan tulee nyt suorittaa projekti Autopilot-robotilla varmistamalla, että projekti on korostettu, ja paina sitten Tarkista-painiketta.
![]() Opettajan työkalupakki
Opettajan työkalupakki
-
Pysähdy ja keskustele
Pyydä oppilaita ennustamaan, mitä he ajattelevat tapahtuvan, kun tämä projekti ladataan ja ajetaan Autopilot-robotilla. Pyydä oppilaita kirjaamaan ennusteensa suunnittelumuistikirjoihin. Jos aika sallii, pyydä jokaista ryhmää kertomaan ennustuksensa.Opiskelijoiden tulee ennustaa, että Autopilot liikkuu ensin oletusnopeudellaan (50 %), sitten hitaammin (25 %) kuin oletusnopeus ja sitten nopeammin (75 %) kuin oletusnopeus.
-
Malli ensin
Mallinne projektin suorittamisesta luokan edessä, ennen kuin kaikki oppilaat yrittävät kerralla. Kokoa oppilaat yhdelle alueelle ja jätä tarpeeksi tilaa autopilotille liikkua 15 tuumaa, jos se sijoitetaan lattialle.Kerro opiskelijoille, että nyt on heidän vuoronsa toteuttaa projektinsa. Varmista, että niillä on vapaa polku ja etteivät autopilotit törmää toisiinsa.
Vaihe 3: Aja eteenpäin ja taaksepäin eri nopeuksilla
-
Ohjelmoijan tulisi vaihtaa toinen -taajuusmuuttaja lohkoon ajaakseen taaksepäin eikä eteenpäin.
-
Ohjelmoijan tulee sitten ladata projekti.
-
Kuljettajan tulee nyt ajaa projekti Autopilot-robotilla varmistamalla, että projekti on korostettu ja painamalla Check-painiketta.
![]() Opettajan työkalupakki
-
Vaiheen 3 suorittaminen
Opettajan työkalupakki
-
Vaiheen 3 suorittaminen
-
Projektia ei tarvitse tallentaa uudelleen, koska VEXcode IQ tallentaa automaattisesti.
-
Jos haluat muuttaa [drive for] -lohkon arvosta eteenpäin taaksepäin, napsauta pudotusvalikkoa ja valitse taaksepäin.
-
Jos oppilaat käyttävät tietokonetta, muistuta heitä irrottamaan USB-kaapeli Robot Brainista ennen ohjelman suorittamista.
-
Koska emme valitse uutta paikkaa, uusi ohjelma latautuu paikkaan 1 ja korvaa edellisen ohjelman.