
Exploration de la vitesse - Partie 2
Étape 1 : Ajoutez une broche de connexion au moyeu de roue.

- Le constructeur doit ajouter une broche de connecteur 1x1 à l'un des moyeux de roue afin que vous puissiez facilement voir à quelle vitesse le moteur et la roue tournent.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
Soulignez que dans la zone de programmation, il y a déjà un {when started} bloc qui s'y trouve par défaut. Chaque programme commencera par ce bloc. Au démarrage du programme, les blocs connectés seront suivis dans l'ordre dans lequel ils sont placés.
Démontrez en cliquant sur le bloc [lecteur] et en le faisant glisser vers la zone de programmation, en le connectant au {when started} bloc. Vous entendrez un clic lorsqu'il s'attachera.
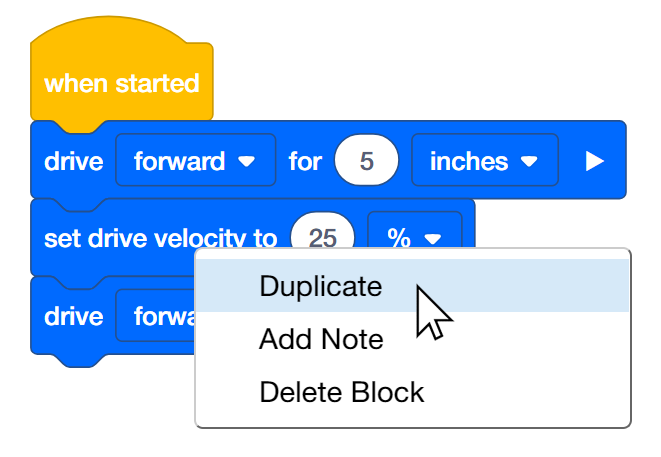
Les deuxième et troisième blocs sont les mêmes que les quatrième et cinquième blocs. Après avoir ajouté le troisième bloc, le programmeur peut faire un clic droit ou long sur le deuxième bloc et choisir Dupliquer pour ajouter les quatrième et cinquième blocs. Ensuite, la vitesse du quatrième bloc peut être modifiée à 75 %.
Étape 2 : Avancez de 15 pouces à différentes vitesses
-
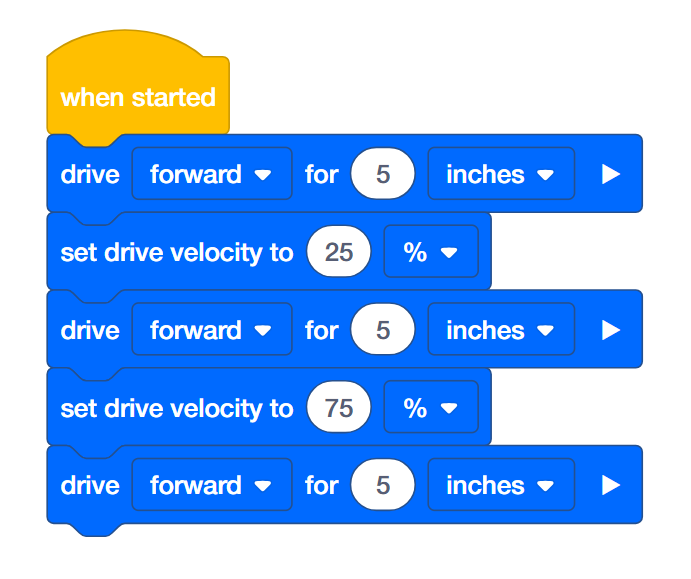
Le programmeur doit construire ce projet dans VEXcode IQ.
-
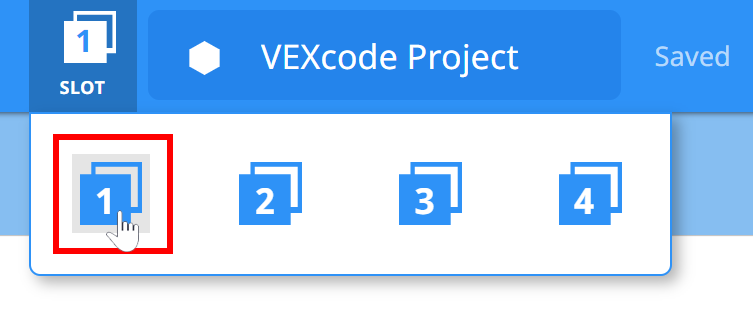
Cliquez sur l'icône Fente. Vous pouvez télécharger votre projet dans l'un des quatre emplacements disponibles dans le Robot Brain. Cliquez sur le chiffre 1.
-
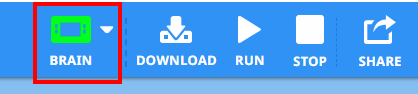
Le programmeur doit connecter le robot à votre ordinateur ou à votre tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion réussie a été établie.
-
Ensuite, cliquez sur le bouton Télécharger dans la barre d'outils pour télécharger le projet Drive Velocity dans le Robot Brain.
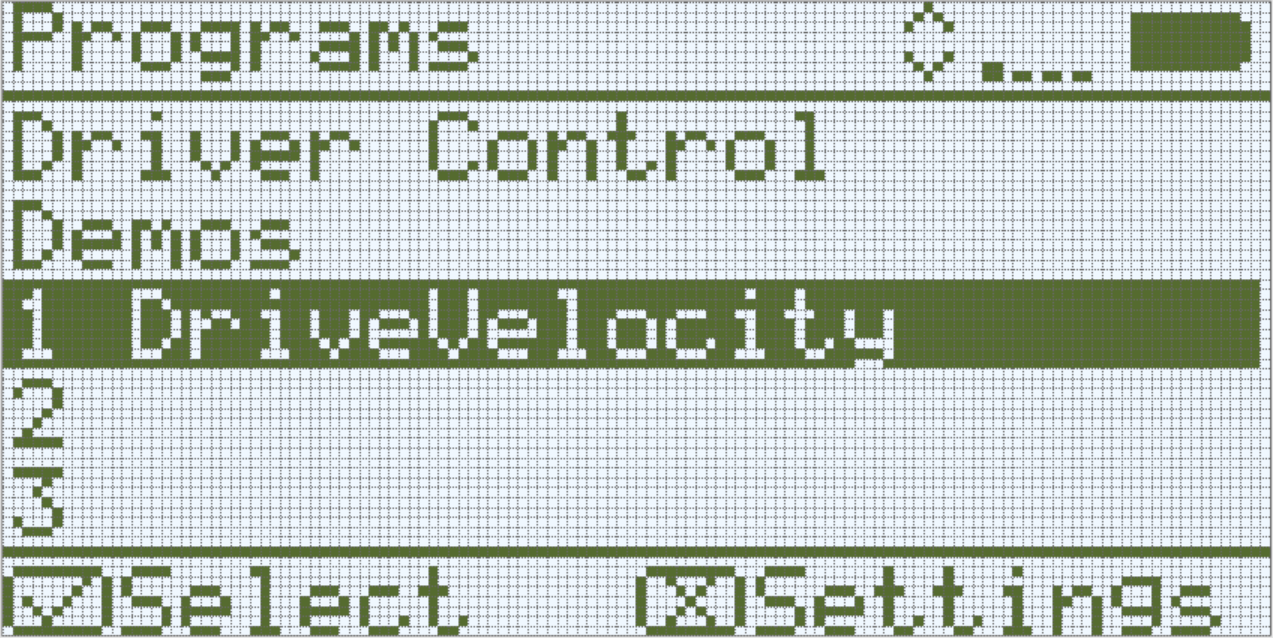
- L'opérateur doit vérifier que votre projet a été téléchargé dans le cerveau du pilote automatique en regardant l'écran du cerveau du robot. Le nom du projet doit être indiqué dans le créneau 1.
- Le pilote doit maintenant exécuter le projet sur le robot pilote automatique en s'assurant que le projet est en surbrillance, puis en appuyant sur le bouton Vérifier.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Demandez aux élèves de prédire ce qu'ils pensent qu'il se passera lorsque ce projet sera téléchargé et exécuté sur le robot pilote automatique. Dites aux élèves d'enregistrer leurs prédictions dans leurs cahiers d'ingénierie. Si le temps le permet, demandez à chaque groupe de partager sa prédiction.Les étudiants doivent prédire que le pilote automatique avancera d'abord à sa vitesse par défaut (50 %), puis plus lentement (25 %) que la vitesse par défaut, puis plus rapidement (75 %) que la vitesse par défaut.
-
Modéliser d'abord
Modéliser l'exécution du projet devant la classe avant que tous les élèves n'essaient en même temps. Rassemblez les élèves dans une zone et laissez suffisamment de place pour que le pilote automatique se déplace de 15 pouces s'il est placé sur le sol.Dites aux élèves que c'est maintenant à leur tour de gérer leur projet. Assurez-vous qu'ils ont un chemin clair et qu'aucun pilote automatique ne se croise.
Étape 3 : Avancer et reculer à différentes vitesses
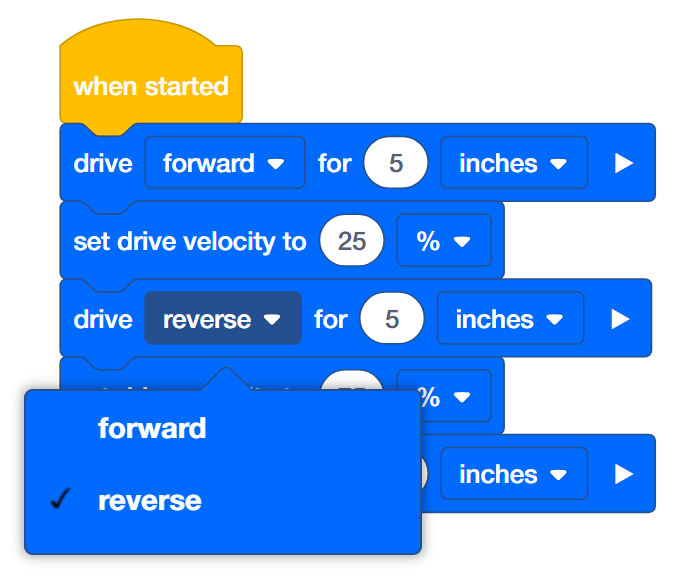
- Le programmateur doit changer le deuxième entraînement pour que le bloc fonctionne en marche arrière plutôt qu'en marche avant.
- Le programmeur doit ensuite télécharger le projet.
- Le pilote doit maintenant exécuter le projet sur le robot pilote automatique en s'assurant que le projet est mis en surbrillance et en appuyant sur le bouton Vérifier.
![]() Boîte à outils de l'enseignant
-
Terminer l'étape 3
Boîte à outils de l'enseignant
-
Terminer l'étape 3
-
Il n'est pas nécessaire d'enregistrer à nouveau le projet car VEXcode IQ enregistrera automatiquement.
-
Pour changer le bloc [drive for] de marche avant à marche arrière, cliquez simplement sur le menu déroulant et sélectionnez marche arrière.
-
Si les élèves utilisent un ordinateur, rappelez-leur de débrancher le câble USB de Robot Brain avant d'exécuter le programme.
-
Comme nous ne sélectionnons pas un nouvel emplacement, le nouveau programme sera téléchargé sur l'emplacement 1 et remplacera le programme précédent.