
Der VEX IQ Gyrosensor
Lesen Sie mehr über den Gyro-Sensor
Um mehr über den Gyro-Sensor zu erfahren, bitten Sie den Leser, zu organisieren, wie die Gruppe den Artikel des VEX IQ Gyro-Sensors aus der VEX-Bibliothek lesen wird. Dieser Artikel behandelt die Funktionsweise des Gyro-Sensors und bietet allgemeine Verwendungsmöglichkeiten.

Programmieren mit dem Gyrosensor
Lassen Sie den Programmierer VEXcode IQ öffnen und befolgen Sie diese Schritte:
-
Beginnen Sie mit dem Öffnen des Testbed-Vorlagenbeispielprojekts von VEXcode IQ.

- Wenn Sie Hilfe beim Öffnen des Beispielprojekts benötigen, sehen Sie sich das Tutorial-Video Beispiele für Projekte und Vorlagen verwenden an.
-
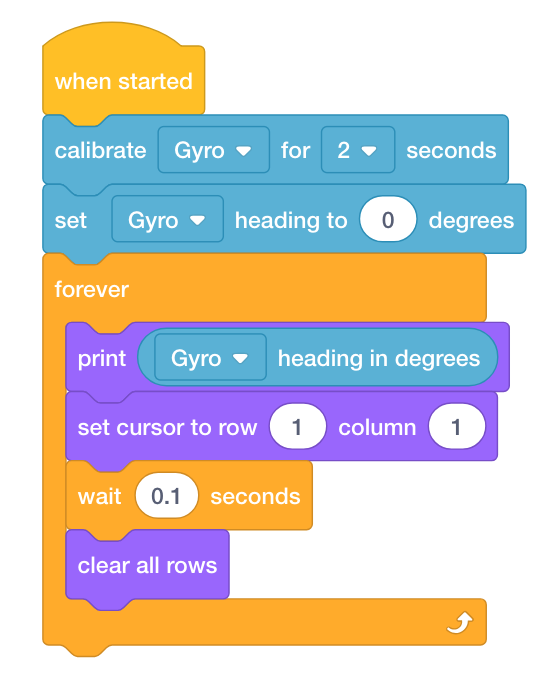
Erstellen Sie das folgende Projekt und speichern Sie es (macOS, Windows, Chromebook , iPad) als Gyrosensor:
Gyrosensor testen
Lassen Sie den Tester das vex IQ Brain an Ihren Computer anschließen und befolgen Sie dann die folgenden Schritte:
- Laden Sie das Projekt in das IQ Robot Brain herunter.
- Führen Sie das Projekt aus , um die Überschrift des aktuellen Gyro-Sensors in Grad zu melden und auszudrucken, während sich der Gyro-Sensor dreht.
- Wenn Sie Hilfe beim Herunterladen und Ausführen eines Projekts benötigen, sehen Sie sich das Tutorial-Video zum Herunterladen und Ausführen eines Projekts an.
- Beantworten Sie auf der Grundlage Ihrer Beobachtungen zum Verhalten des Sensors auf dem Prüfstand und der Informationen aus der Ablesung die folgenden Fragen und bitten Sie den Recorder, sie in Ihrem technischen Notizbuch zu dokumentieren:
- Was bewirkt, dass der Wert des Gyro-Sensors steigt? Was bewirkt, dass sie abnimmt?
- Kann der Gyro-Sensor Werte größer als 360 melden?
- Warum wäre es hilfreich, einen Gyrosensor an einem Roboter anzubringen?
- Kann der Gyrosensor mehr als eine Achse gleichzeitig messen?
- Kann es gleichzeitig auf und ab sowie links und rechts messen?
- Was ist, wenn der Gyrosensor anders am Roboter positioniert ist?
![]() Lehrer-Toolbox
-
Antworten
Lehrer-Toolbox
-
Antworten
Die folgenden Antworten können variieren:
-
Das Drehen des Gyro-Sensors gegen den Uhrzeigersinn erhöht den Wert des Gyro-Sensors und das Drehen im Uhrzeigersinn verringert den Wert.
-
Der Gyro-Sensor kann Werte zwischen 0-359,99 melden. Sobald der Gyro 360 Grad erreicht hat, wird er als Null zurückgemeldet.
-
Die Einbeziehung eines Gyro-Sensors an einem Roboter ermöglicht es dem Roboter, genauere Kurven zu machen.
-
Der Gyrosensor kann jeweils nur eine Achse messen.
- Der Gyrosensor kann sowohl eine x-Achse (von links nach rechts) als auch eine y-Achse (auf und ab) messen, aber nicht gleichzeitig.
- Wenn ein Gyro-Sensor zuerst auf einem Roboter platziert wurde, um eine x-Achse zu messen, könnte der Gyro-Sensor dann auf seine Seite gedreht werden, um die y-Achse zu messen (auf und ab). Dies kann bei der Messung von Manipulatoren wie einem Klauenarm nützlich sein. Der Gyrosensor kann verwendet werden, um den Arm mit genauer Messung anzuheben und abzusenken.
![]() Lehrertipps
Lehrertipps
Bitten Sie die Schüler, die Richtung des Pfeils auf dem Sensor zu identifizieren und den Kreiselsensor zu verdrehen, um zu verstehen, welche Achse er erkennt und wie die Werte, die er meldet, dieser Bewegung entsprechen.
![]() Lehrer-Toolbox
-
Fehlerbehebung
Lehrer-Toolbox
-
Fehlerbehebung
Bei der Arbeit mit dem Gyrosensor kann es vorkommen, dass er sich nicht so verhält, wie er sollte. Wenn dies der Fall ist, beginnen Sie mit der Fehlerbehebung, indem Sie die folgenden Schritte ausführen:
-
Überprüfen Sie zunächst, ob die Firmware des Gyro-Sensors auf dem neuesten Stand ist. In diesem Artikel finden Sie weitere Informationen zum Aktualisieren der Firmware.
-
Wenn die Firmware auf dem neuesten Stand ist, schauen Sie weiter in den Bildschirm Device Info auf dem IQ Brain, um den Winkel und die Anzahl der Umdrehungen zu überprüfen, die auf dem Brain registriert werden. Verwenden Sie den Artikel „Fehlerbehebung bei VEX-IQ-Sensoren“.
-
Wenn die Geräte-Info genaue Werte meldet, könnte das Problem sein, dass der Schüler das Projekt falsch kopiert hat.
-
Um das Projekt zu beheben, überprüfen Sie, ob das Gerät richtig konfiguriert ist - was bedeutet, dass es das richtige Testbed-Beispielprojekt verwendet hat. Weitere Informationen zur Konfiguration des Gyro-Sensors finden Sie im Artikel "So konfigurieren Sie vex IQ-Sensoren - VEXcode IQ ".
-
Stellen Sie sicher, dass die Schüler das Projekt richtig kopiert und gebaut haben. Sie können den Druckblock in VEXcode IQ verwenden, um die aktuellen Sensorwerte auf dem Gehirn anzuzeigen, während das Projekt zum Fehler oder zum Ende des Projekts fortschreitet.
-
-
Wenn die Geräte-Info KEINE genauen Werte meldet, könnte das Problem hardwarebezogen sein.
-
Um Probleme mit der Hardware zu beheben, überprüfen Sie die Portverbindung mit dem Smart-Kabel mithilfe des Artikels „So verbinden Sie VEX IQ-Geräte mit Smart-Ports“.
-
Wenn der Gyro-Sensor richtig angeschlossen ist und er sich immer noch nicht so verhält, wie er sollte, könnte es ein physisches Problem mit dem Gyro-Sensor geben. Testen Sie das Ausschalten mit einem anderen Gyrosensor.
-