
了解陀螺仪传感器
要了解有关陀螺仪传感器的更多信息,请要求读者组织小组如何阅读 VEX 库中的 VEX IQ 陀螺仪传感器 文章。 本文将介绍陀螺仪传感器的工作原理并提供常见用途。

使用陀螺仪传感器进行编程
让程序员打开 VEXcode IQ 并按照以下步骤操作:
-
首先从 VEXcode IQ 打开 Testbed 模板示例项目。

-
如需打开示例项目的帮助,请观看 使用示例项目和模板 教程视频。
-
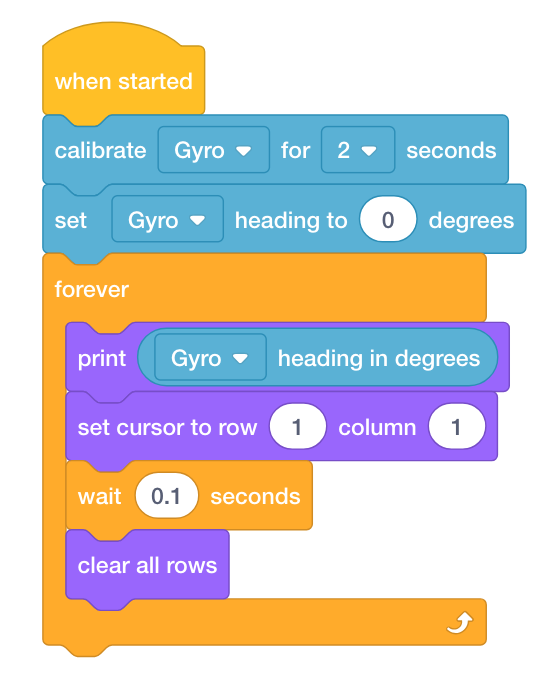
构建以下项目并将其保存(macOS, Windows, Chromebook, iPad)作为陀螺仪传感器:
测试陀螺仪传感器
让测试仪将 VEX IQ Brain 连接到您的计算机,然后按照以下步骤操作:
![]() 教师工具箱
-
答案
教师工具箱
-
答案
以下答案可能有所不同:
-
逆时针旋转陀螺仪传感器会增加陀螺仪传感器的值,顺时针旋转会减少陀螺仪传感器的值。
-
陀螺仪传感器可以报告 0-359.99 之间的值。 一旦陀螺仪达到 360 度,它就会报告为零。
-
在机器人上安装陀螺仪传感器可以使机器人进行更准确的转弯。
-
陀螺仪传感器一次只能测量一个轴。
- 陀螺仪传感器可以测量 x 轴(从左到右)和 y 轴(上下),但不能同时测量。
- 如果首先将陀螺仪传感器放置在机器人上以测量 x 轴,则可以将陀螺仪传感器侧向旋转以测量 y 轴(向上和向下)。 这在测量爪臂等机械手时非常有用。 陀螺仪传感器可用于抬起和降低手臂并进行精确测量。
![]() 老师提示
老师提示
要求学生识别传感器上箭头的方向,并测试扭转陀螺仪传感器,以了解它检测到哪个轴以及它报告的值如何与该运动相对应。
![]() 教师工具箱
-
疑难解答
教师工具箱
-
疑难解答
使用陀螺仪传感器时,可能会出现其行为不正常的情况。 如果发生这种情况,请尝试以下步骤开始故障排除:
-
首先检查陀螺仪传感器的固件是否是最新的。 阅读 本文 以获取有关如何更新固件的更多信息。
-
如果固件是最新的,请进一步查看 IQ Brain 上的设备信息屏幕,检查 Brain 上注册的角度和圈数。 使用文章“如何排除 VEX IQ 传感器故障”。
-
如果设备信息报告了准确的值,则问题可能是学生错误复制了项目。
-
要对项目进行故障排除,请检查设备是否配置正确 - 这意味着它们使用了正确的 Testbed 示例项目。 有关如何配置陀螺仪传感器的更多信息,请阅读“如何配置 VEX IQ 传感器 - VEXcode IQ” 文章。
-
确保学生正确复制并构建项目。 当项目进行到错误或项目结束时,您可以使用 VEXcode IQ 中的 print 块在 Brain 上显示当前传感器值。
-
-
如果设备信息未报告准确值,则问题可能与硬件相关。
-
要排除硬件故障,请尝试使用文章“如何将 VEX IQ 设备连接到智能端口”来检查智能电缆的端口连接。
-
如果陀螺仪传感器连接正确,但仍无法正常工作,则陀螺仪传感器可能存在物理问题。 测试用另一个陀螺仪传感器将其关闭。
-