
VEX IQ Gyro Sensor
อ่านเกี่ยวกับ Gyro Sensor
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับ Gyro Sensor ให้ขอให้ผู้อ่านจัดระเบียบว่ากลุ่มจะอ่าน บทความ vex IQ Gyro Sensor จากไลบรารี VEX ได้อย่างไร บทความนี้จะกล่าวถึงวิธีการทำงานของ Gyro Sensor และการใช้งานทั่วไป

โปรแกรมด้วยเซ็นเซอร์ Gyro
ให้โปรแกรมเมอร์เปิด VEXcode IQ และทำตามขั้นตอนต่อไปนี้:
-
เริ่มต้นด้วยการเปิดโครงการตัวอย่างเทมเพลตทดสอบจาก VEXcode IQ

- สำหรับความช่วยเหลือในการเปิดโปรเจกต์ตัวอย่างโปรดดูวิดีโอ สอนการ ใช้โปรเจกต์ตัวอย่างและเทมเพลต
-
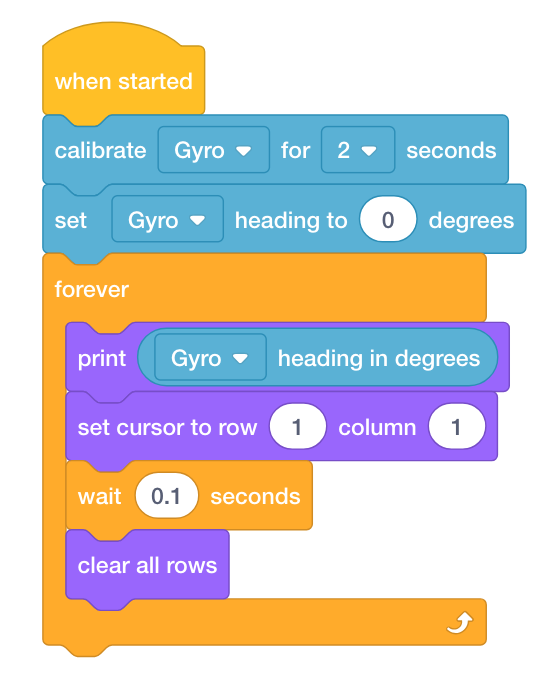
สร้างโครงการต่อไปนี้และบันทึก (macOS, Windows, Chromebook, iPad) เป็น Gyro Sensor:
ทดสอบเซ็นเซอร์ Gyro
ให้ผู้ทดสอบเชื่อมต่อ vex IQ Brain กับคอมพิวเตอร์ของคุณแล้วทำตามขั้นตอนต่อไปนี้:
- ดาวน์โหล ดโครงการไปยัง IQ Robot Brain
- เรียกใช้โครงการ เพื่อรายงานและพิมพ์ว่าส่วนหัวของเซ็นเซอร์ Gyro ปัจจุบันเป็นองศาใดเมื่อเซ็นเซอร์ Gyro หมุน
- สำหรับความช่วยเหลือในการดาวน์โหลดและเรียกใช้โครงการให้ดูวิดีโอ สอนการ ดาวน์โหลดและเรียกใช้โครงการ
- จากการสังเกตของคุณว่าเซ็นเซอร์ทำงานอย่างไรบน Testbed
และข้อมูลจากการอ่านให้ตอบคำถามต่อไปนี้และขอให้ผู้บันทึกบันทึกบันทึกลงในสมุดบันทึกวิศวกรรมของคุณ:
- อะไรคือสาเหตุที่ทำให้ค่าของ Gyro Sensor เพิ่มขึ้น? อะไรทำให้มันลดลง?
- Gyro Sensor สามารถรายงานค่าได้มากกว่า 360 หรือไม่
- เหตุใดการใส่ Gyro Sensor บนหุ่นยนต์จึงเป็นประโยชน์?
- เซ็นเซอร์ Gyro สามารถวัดแกนได้มากกว่าหนึ่งแกนต่อครั้งหรือไม่?
- มันสามารถวัดขึ้นและลงรวมทั้งซ้ายและขวาในเวลาเดียวกันได้หรือไม่?
- แล้วถ้าเซ็นเซอร์ Gyro อยู่ในตำแหน่งที่แตกต่างกันบนหุ่นยนต์ล่ะ?
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
คำตอบต่อไปนี้อาจแตกต่างกันไป:
-
การหมุนเซ็นเซอร์ Gyro ทวนเข็มนาฬิกาจะเพิ่มค่าของเซ็นเซอร์ Gyro และหมุนตามเข็มนาฬิกาจะลดค่าลง
-
Gyro Sensor สามารถรายงานค่าระหว่าง 0-359.99 เมื่อไจโรถึง 360 องศามันจะกลับมาเป็นศูนย์
-
รวมถึง Gyro Sensor บนหุ่นยนต์ช่วยให้หุ่นยนต์เลี้ยวได้แม่นยำยิ่งขึ้น
-
เซ็นเซอร์ Gyro สามารถวัดได้ครั้งละหนึ่งแกนเท่านั้น
- เซ็นเซอร์ Gyro สามารถวัดแกน x (ซ้ายไปขวา) เช่นเดียวกับแกน y (ขึ้นและลง) ไม่ใช่ในเวลาเดียวกัน
- หาก Gyro Sensor ถูกวางครั้งแรกบนหุ่นยนต์เพื่อให้มันวัดแกน x จากนั้น Gyro Sensor สามารถเปิดด้านข้างเพื่อวัดแกน y (ขึ้นและลง) สิ่งนี้อาจมีประโยชน์เมื่อวัดตัวควบคุมเช่นแขนกรงเล็บ เซ็นเซอร์ Gyro สามารถใช้เพื่อยกและลดแขนด้วยการวัดที่แม่นยำ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
ขอให้นักเรียนระบุทิศทางของลูกศรบนเซ็นเซอร์และทดสอบการบิดเซ็นเซอร์ไจโรเพื่อทำความเข้าใจว่าแกนใดที่ตรวจพบและค่าที่รายงานสอดคล้องกับการเคลื่อนไหวนั้นอย่างไร
![]() กล่องเครื่องมือครู
-
การแก้ไขปัญหา
กล่องเครื่องมือครู
-
การแก้ไขปัญหา
เมื่อทำงานกับ Gyro Sensor อาจมีกรณีที่ไม่ได้ทำงานอย่างที่ควรจะเป็น หากสิ่งนี้เกิดขึ้นให้เริ่มการแก้ไขปัญหาโดยลองทำตามขั้นตอนต่อไปนี้:
-
เริ่มต้นด้วยการตรวจสอบว่าเฟิร์มแวร์ของ Gyro Sensor เป็นปัจจุบัน อ่าน บทความ นี้เพื่อดูข้อมูลเพิ่มเติมเกี่ยวกับวิธีอัพเดทเฟิร์มแวร์
-
หากเฟิร์มแวร์เป็นปัจจุบันให้ดูเพิ่มเติมในหน้าจอข้อมูลอุปกรณ์บน IQ Brain เพื่อตรวจสอบมุมและจำนวนรอบที่ลงทะเบียนบน Brain ใช้บทความ "วิธีแก้ปัญหาเซ็นเซอร์ vexIQ"
-
หากข้อมูลอุปกรณ์รายงานค่าที่ถูกต้องปัญหาอาจเกิดจากการที่นักเรียนคัดลอกโครงการผิดพลาด
-
ในการแก้ไขปัญหาโครงการให้ตรวจสอบว่าอุปกรณ์ได้รับการกำหนดค่าอย่างถูกต้องซึ่งหมายความว่าพวกเขาใช้โครงการตัวอย่างทดสอบที่ถูกต้อง สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการกำหนดค่าเซ็นเซอร์ Gyro โปรดอ่าน บทความ "วิธีการกำหนดค่าเซ็นเซอร์ vex IQ - VEXcode IQ"
-
ตรวจสอบให้แน่ใจว่านักเรียนคัดลอกและสร้างโครงการอย่างถูกต้อง คุณสามารถใช้ บล็อกการ พิมพ์ใน VEXcode IQ เพื่อแสดงค่าเซ็นเซอร์ปัจจุบันบนสมองเมื่อโครงการดำเนินไปจนถึงข้อผิดพลาดหรือสิ้นสุดโครงการ
-
-
หากข้อมูลอุปกรณ์ไม่รายงานค่าที่ถูกต้องปัญหาอาจเกี่ยวข้องกับฮาร์ดแวร์
-
หากต้องการแก้ไขปัญหาฮาร์ดแวร์ให้ลองตรวจสอบการเชื่อมต่อพอร์ตกับสายเคเบิลอัจฉริยะโดยใช้บทความ "วิธีเชื่อมต่ออุปกรณ์ vex IQ กับพอร์ตอัจฉริยะ"
-
หากเซ็นเซอร์ Gyro เชื่อมต่ออย่างถูกต้องและยังไม่ทำงานตามที่ควรจะเป็นอาจมีปัญหาทางกายภาพกับเซ็นเซอร์ Gyro ทดสอบการสลับออกด้วยเซ็นเซอร์ Gyro อื่น
-