
De VEX IQ Gyro Sensor
Lees meer over de gyrosensor
Voor meer informatie over de gyrosensor, vraagt u de lezer om te organiseren hoe de groep het artikel over de VEX IQ gyrosensor uit de VEX-bibliotheek ZAL lezen. Dit artikel behandelt hoe de gyrosensor werkt en biedt veelvoorkomend gebruik.

Programma met de gyrosensor
Laat de programmeur VEXcode IQ openen en volg deze stappen:
-
Begin met het openen van het voorbeeldproject Testbed-sjabloon van VEXcode IQ.

- Bekijk de instructievideo Voorbeeldprojecten en sjablonen gebruiken voor hulp bij het openen van het voorbeeldproject.
-
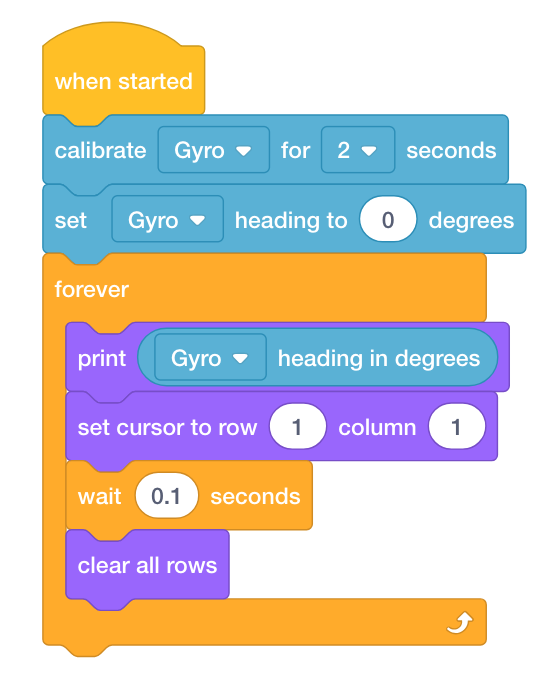
Bouw het volgende project en sla het (macOS, Windows, Chromebook, iPad) op als Gyro Sensor:
Test de gyrosensor
Laat de tester de VEX IQ Brain aansluiten op uw computer en volg dan deze stappen:
- Download het project naar de IQ Robot Brain.
- Voer het project uit om te rapporteren en af te drukken wat de kop van de huidige gyrosensor is in graden terwijl de gyrosensor draait.
- Bekijk de zelfstudievideo Een project downloaden en uitvoeren voor hulp bij het downloaden en uitvoeren van een project.
- Beantwoord op basis van uw observaties van hoe de sensor zich op het testbed gedroeg en de informatie uit de meting de volgende vragen en vraag de recorder om deze in uw technische notebook te documenteren:
- Wat zorgt ervoor dat de waarde van de gyrosensor toeneemt? Wat zorgt ervoor dat het afneemt?
- Kan de gyrosensor waarden hoger dan 360 rapporteren?
- Waarom zou het nuttig zijn om een gyrosensor op een robot op te nemen?
- Kan de gyrosensor meer dan één as tegelijk meten?
- Kan het tegelijkertijd op en neer en links en rechts meten?
- Wat als de gyrosensor anders is gepositioneerd op de robot?
![]() Teacher Toolbox
-
Antwoorden
Teacher Toolbox
-
Antwoorden
De volgende antwoorden kunnen variëren:
-
Door de gyrosensor tegen de klok in te draaien, wordt de waarde van de gyrosensor verhoogd en door hem met de klok mee te draaien, wordt de waarde verlaagd.
-
De gyrosensor kan waarden rapporteren tussen 0-359,99. Zodra de Gyro 360 graden bereikt, rapporteert deze terug als nul.
-
Door een gyrosensor op een robot te plaatsen, kan de robot nauwkeurigere bochten maken.
-
De gyrosensor kan slechts één as tegelijk meten.
- De Gyrosensor kan zowel een x-as (van links naar rechts) als een y-as (op en neer) meten, maar niet tegelijkertijd.
- Als een gyrosensor eerst op een robot werd geplaatst zodat deze een x-as meet, kan de gyrosensor vervolgens op zijn kant worden gedraaid om de y-as (op en neer) te meten. Dit kan handig zijn bij het meten van manipulatoren zoals een klauwarm. De gyrosensor kan worden gebruikt om de arm met nauwkeurige metingen omhoog en omlaag te brengen.
![]() Tips voor docenten
Tips voor docenten
Vraag studenten om de richting van de pijl op de sensor te identificeren en test het draaien van de gyrosensor om te begrijpen welke as het detecteert en hoe de waarden die het rapporteert overeenkomen met die beweging.
![]() Teacher Toolbox
-
Problemen oplossen
Teacher Toolbox
-
Problemen oplossen
Bij het werken met de gyrosensor kunnen er gevallen zijn waarin deze zich niet gedraagt zoals zou moeten. Als dit gebeurt, begin dan met het oplossen van problemen door de volgende stappen te proberen:
-
Controleer eerst of de firmware van de gyrosensor up-to-date is. Lees dit artikel voor meer informatie over het bijwerken van firmware.
-
Als de firmware up-to-date is, kijk dan verder in het scherm Apparaatinformatie op de IQ Brain om te controleren of de hoek en het aantal omwentelingen zich op de Brain registreren. Gebruik het artikel 'Hoe PROBLEMEN met VEX-IQ-sensoren op te lossen'.
-
Als de apparaatinformatie nauwkeurige waarden rapporteert, kan het probleem zijn dat de student het project verkeerd heeft gekopieerd.
-
Om problemen met het project op te lossen, controleert u of het apparaat correct is geconfigureerd - wat betekent dat ze het juiste Testbed-voorbeeldproject hebben gebruikt. Lees voor meer informatie over het configureren van de gyrosensor het artikel "Hoe configureer ik VEX IQ-sensoren - VEXcode IQ".
-
Zorg ervoor dat de studenten het project correct hebben gekopieerd en gebouwd. U kunt het afdrukblok in VEXcode IQ gebruiken om de huidige sensorwaarden op de hersenen weer te geven terwijl het project doorgaat naar de fout of naar het einde van het project.
-
-
Als de apparaatinformatie GEEN nauwkeurige waarden rapporteert, kan het probleem hardwaregerelateerd zijn.
-
Om problemen met de hardware op te lossen, probeert u de poortverbinding met de slimme kabel te controleren met behulp van het artikel, "Hoe VEX IQ-apparaten aan TE sluiten op slimme poorten."
-
Als de gyrosensor goed is aangesloten en zich nog steeds niet gedraagt zoals het zou moeten, kan er een fysiek probleem zijn met de gyrosensor. Test het omschakelen met een andere gyrosensor.
-