
Cảm biến VEX IQ Gyro
Đọc về Cảm biến con quay hồi chuyển
Để tìm hiểu thêm về Cảm biến con quay hồi chuyển, hãy yêu cầu Người đọc sắp xếp cách nhóm sẽ đọc bài viết Cảm biến con quay hồi chuyển IQ VEX từ Thư viện VEX. Bài viết này sẽ đề cập đến cách thức hoạt động của Cảm biến con quay hồi chuyển và cung cấp các ứng dụng phổ biến.

Lập trình với Cảm biến Con quay hồi chuyển
Yêu cầu Lập trình viên mở VEXcode IQ và làm theo các bước sau:
-
Bắt đầu bằng cách mở dự án mẫu Testbed từ VEXcode IQ.

- Để được trợ giúp mở dự án mẫu, hãy xem video hướng dẫn Sử dụng dự án mẫu và mẫu.
-
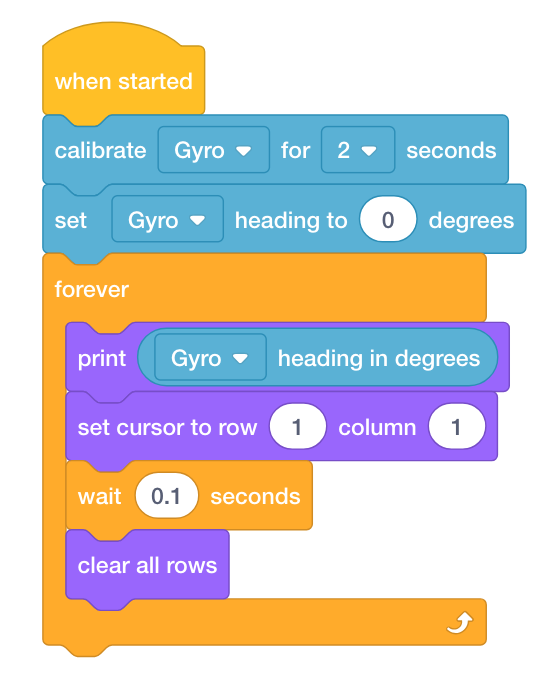
Xây dựng dự án sau và lưu nó (macOS, Windows, Chromebook, iPad) dưới dạng Cảm biến con quay hồi chuyển:
Kiểm tra cảm biến con quay hồi chuyển
Yêu cầu Tester kết nối VEX IQ Brain với máy tính của bạn và sau đó làm theo các bước sau:
- Tải dự án về IQ Robot Brain.
- Chạy dự án để báo cáo và in tiêu đề của Cảm biến Gyro hiện tại theo độ khi Cảm biến Gyro quay.
- Để được trợ giúp tải xuống và chạy dự án, hãy xem video hướng dẫn Tải xuống và chạy Dự án.
- Dựa trên những quan sát của bạn về cách cảm biến hoạt động trên Testbed và thông tin từ bài đọc, hãy trả lời các câu hỏi sau và yêu cầu Máy ghi âm ghi lại chúng trong sổ ghi chép kỹ thuật của bạn:
- Điều gì làm cho giá trị của Cảm biến Gyro tăng lên? Điều gì khiến nó giảm?
- Cảm biến Gyro có thể báo cáo các giá trị lớn hơn 360 không?
- Tại sao đưa cảm biến Gyro vào robot lại hữu ích?
- Cảm biến Gyro có thể đo nhiều hơn một trục cùng một lúc không?
- Nó có thể đo lên xuống cũng như trái và phải cùng một lúc không?
- Nếu cảm biến Gyro được đặt ở vị trí khác trên robot thì sao?
![]() Hộp công cụ dành cho giáo viên
-
Câu trả lời
Hộp công cụ dành cho giáo viên
-
Câu trả lời
Các câu trả lời sau đây có thể khác nhau:
-
Xoay Cảm biến Gyro ngược chiều kim đồng hồ làm tăng giá trị của Cảm biến Gyro và xoay theo chiều kim đồng hồ làm giảm giá trị.
-
Cảm biến Gyro có thể báo cáo các giá trị từ 0-359,99. Khi Gyro đạt đến 360 độ, nó báo cáo lại là 0.
-
Bao gồm Cảm biến Con quay hồi chuyển trên rô bốt cho phép rô bốt rẽ chính xác hơn.
-
Cảm biến Gyro chỉ có thể đo một trục tại một thời điểm.
- Cảm biến Gyro có thể đo trục x (từ trái sang phải) cũng như trục y (lên và xuống), nhưng không phải cùng một lúc.
- Nếu Cảm biến Con quay hồi chuyển lần đầu tiên được đặt trên robot để đo trục x, thì Cảm biến Con quay hồi chuyển sau đó có thể được bật về phía nó để đo trục y (lên và xuống). Điều này có thể hữu ích khi đo các tay máy như tay kẹp. Cảm biến Gyro có thể được sử dụng để nâng và hạ cánh tay với phép đo chính xác.
![]() Lời khuyên của giáo viên
Lời khuyên của giáo viên
Yêu cầu học sinh xác định hướng của mũi tên trên cảm biến và kiểm tra xoắn Cảm biến Gyro để hiểu nó phát hiện trục nào và các giá trị mà nó báo cáo tương ứng với chuyển động đó như thế nào.
![]() Hộp công cụ dành cho giáo viên
-
Xử lý sự cố
Hộp công cụ dành cho giáo viên
-
Xử lý sự cố
Khi làm việc với Cảm biến Con quay hồi chuyển, có thể có những trường hợp cảm biến không hoạt động như bình thường. Nếu điều này xảy ra, hãy bắt đầu khắc phục sự cố bằng cách thử các bước sau:
-
Trước tiên, hãy bắt đầu bằng cách kiểm tra xem phần sụn của Cảm biến Gyro đã được cập nhật hay chưa. Đọc bài viết này để biết thêm thông tin về cách cập nhật firmware.
-
Nếu firmware được cập nhật, hãy xem thêm màn hình Thông tin thiết bị trên IQ Brain để kiểm tra góc và số lượt đăng ký trên Brain. Sử dụng bài viết "Cách khắc phục sự cố cảm biến IQ VEX".
-
Nếu Thông tin thiết bị báo cáo các giá trị chính xác, vấn đề có thể là học sinh đã sao chép sai dự án.
-
Để khắc phục sự cố dự án, hãy kiểm tra xem thiết bị đã được định cấu hình đúng chưa - có nghĩa là họ đã sử dụng đúng dự án mẫu Testbed. Để biết thêm thông tin về cách định cấu hình Cảm biến con quay hồi chuyển, hãy đọc bài viết "Cách định cấu hình cảm biến IQ VEX - VEXcode IQ".
-
Đảm bảo rằng các sinh viên đã sao chép và xây dựng dự án một cách chính xác. Bạn có thể sử dụng khối in trong VEXcode IQ để hiển thị các giá trị cảm biến hiện tại trên Não khi dự án tiến hành đến lỗi hoặc đến cuối dự án.
-
-
Nếu Thông tin thiết bị KHÔNG báo cáo các giá trị chính xác, thì sự cố có thể liên quan đến phần cứng.
-
Để khắc phục sự cố phần cứng, hãy thử kiểm tra kết nối cổng với Cáp thông minh bằng cách sử dụng bài viết, “Cách kết nối thiết bị IQ VEX với cổng thông minh”.
-
Nếu Cảm biến Gyro được kết nối đúng cách và vẫn không hoạt động bình thường, có thể có vấn đề về thể chất với Cảm biến Gyro. Kiểm tra việc tắt máy bằng một Cảm biến Con quay hồi chuyển khác.
-