
वेग की खोज - भाग 2
चरण 1: व्हील हब में कनेक्टर पिन जोड़ें।

- निर्माता को एक पहिया हब में 1x1 कनेक्टर पिन जोड़ना चाहिए ताकि आप आसानी से देख सकें कि मोटर और पहिया कितनी तेजी से घूम रहे हैं।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
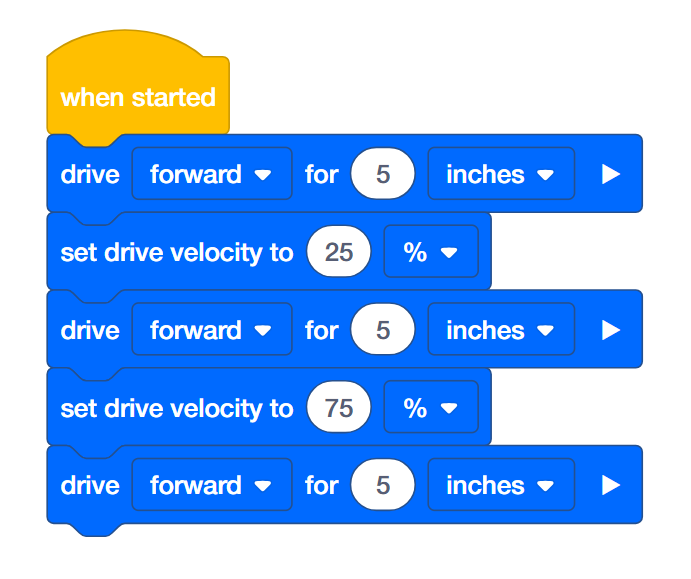
बता दें कि प्रोग्रामिंग क्षेत्र में पहले से ही डिफ़ॉल्ट रूप से {when started} ब्लॉक स्थित है। प्रत्येक कार्यक्रम इसी ब्लॉक से शुरू होगा। जब प्रोग्राम शुरू किया जाता है तो जुड़े हुए ब्लॉकों का उसी क्रम में अनुसरण किया जाएगा जिसमें उन्हें रखा गया है।
[ड्राइव] ब्लॉक पर क्लिक करके उसे प्रोग्रामिंग क्षेत्र में खींचकर {when started} ब्लॉक से जोड़ने का प्रदर्शन करें। जब यह जुड़ेगा तो आपको एक क्लिक की आवाज सुनाई देगी।
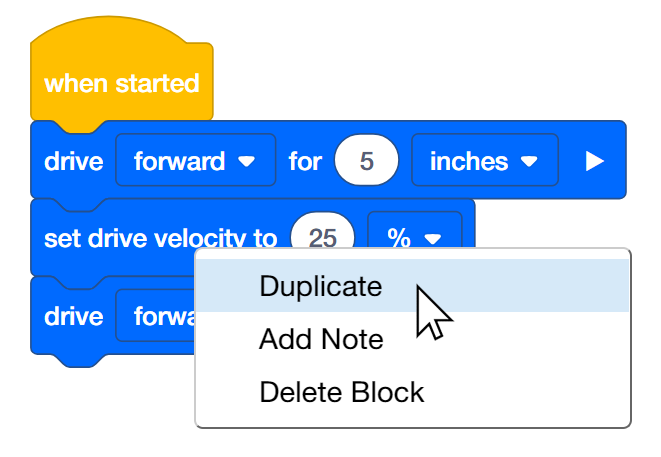
दूसरा और तीसरा ब्लॉक चौथे और पांचवें ब्लॉक के समान हैं। तीसरा ब्लॉक जोड़ने के बाद, प्रोग्रामर दूसरे ब्लॉक पर राइट-क्लिक या लॉन्ग-क्लिक कर सकता है और चौथे और पांचवें ब्लॉक को जोड़ने के लिए डुप्लिकेट चुन सकता है। फिर चौथे ब्लॉक का वेग 75% तक बदला जा सकता है।
चरण 2: अलग-अलग वेगों पर 15 इंच आगे बढ़ें
-
प्रोग्रामर को यह प्रोजेक्ट VEXcode IQ में बनाना चाहिए।
-
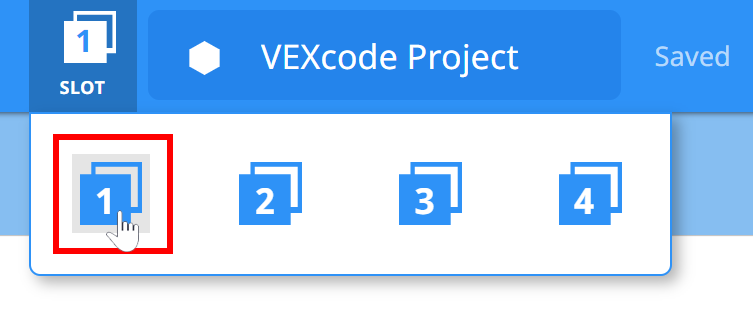
स्लॉट आइकन पर क्लिक करें. आप अपने प्रोजेक्ट को रोबोट ब्रेन में उपलब्ध चार स्लॉट में से किसी एक पर डाउनलोड कर सकते हैं। नंबर 1 पर क्लिक करें.
-
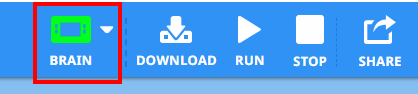
प्रोग्रामर को रोबोट को आपके कंप्यूटर या टैबलेट से जोड़ना चाहिए। एक बार सफल कनेक्शन हो जाने पर टूलबार में ब्रेन आइकन हरा हो जाता है।
-
फिर, ड्राइव वेलोसिटी प्रोजेक्ट को रोबोट ब्रेन में डाउनलोड करने के लिए टूलबार पर डाउनलोड बटन पर क्लिक करें।
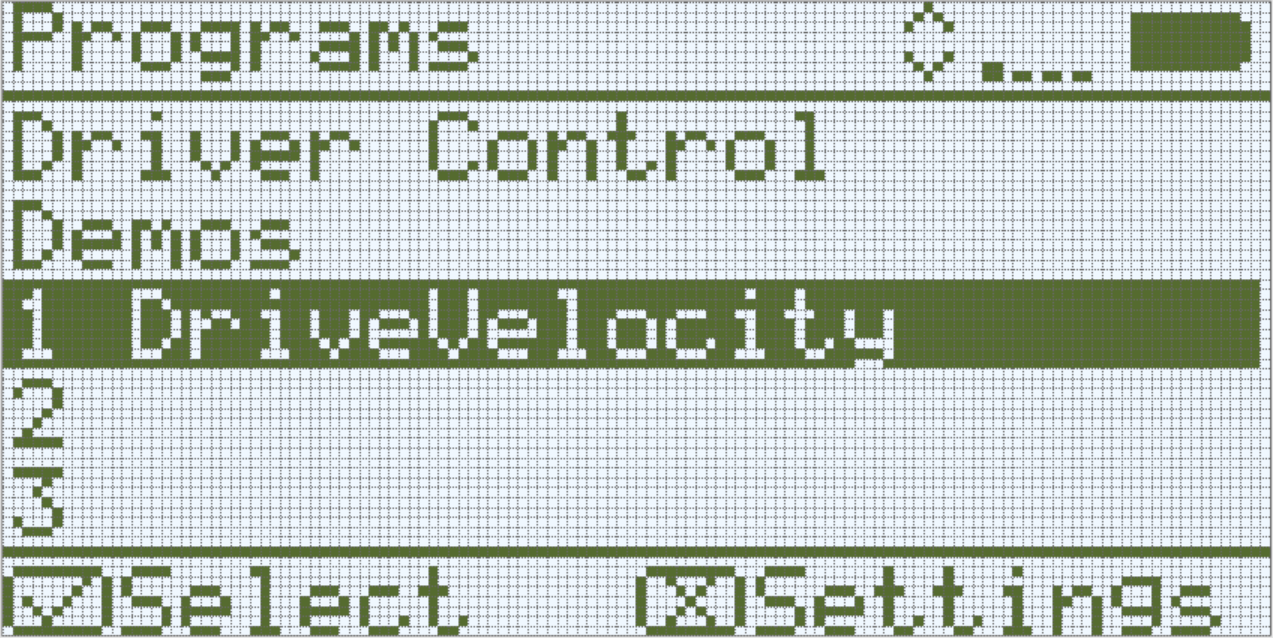
- ऑपरेटर को रोबोट ब्रेन की स्क्रीन को देखकर यह सुनिश्चित करना चाहिए कि आपका प्रोजेक्ट ऑटोपायलट ब्रेन में डाउनलोड हो गया है। परियोजना का नाम स्लॉट 1 में सूचीबद्ध होना चाहिए।
- अब ड्राइवर को ऑटोपायलट रोबोट पर प्रोजेक्ट चलाना चाहिए, यह सुनिश्चित करके कि प्रोजेक्ट हाइलाइट किया गया है और फिर चेक बटन दबाएं।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
विद्यार्थियों से यह अनुमान लगाने को कहें कि उनके विचार से जब यह प्रोजेक्ट डाउनलोड किया जाएगा और ऑटोपायलट रोबोट पर चलाया जाएगा तो क्या होगा। विद्यार्थियों से कहें कि वे अपनी भविष्यवाणियाँ अपनी इंजीनियरिंग नोटबुक में लिखें। यदि समय हो तो प्रत्येक समूह से अपना पूर्वानुमान साझा करने को कहें।छात्रों को यह अनुमान लगाना चाहिए कि ऑटोपायलट पहले अपने डिफ़ॉल्ट वेग (50%) पर आगे बढ़ेगा, फिर डिफ़ॉल्ट वेग से धीमी गति से (25%), और फिर डिफ़ॉल्ट वेग से तेज़ गति से (75%) आगे बढ़ेगा।
-
मॉडल प्रथम
सभी छात्रों को एक साथ प्रयास करने से पहले कक्षा के सामने परियोजना को चलाने वाला मॉडल। छात्रों को एक जगह पर इकट्ठा करें और यदि ऑटोपायलट को फर्श पर रखा जाए तो उसे 15 इंच तक चलने के लिए पर्याप्त जगह छोड़ दें।विद्यार्थियों से कहें कि अब उनकी परियोजना चलाने की बारी है। सुनिश्चित करें कि उनके पास स्पष्ट रास्ता हो और कोई भी ऑटोपायलट एक दूसरे से न टकराए।
चरण 3: अलग-अलग वेगों पर आगे और पीछे की ओर ड्राइव करें
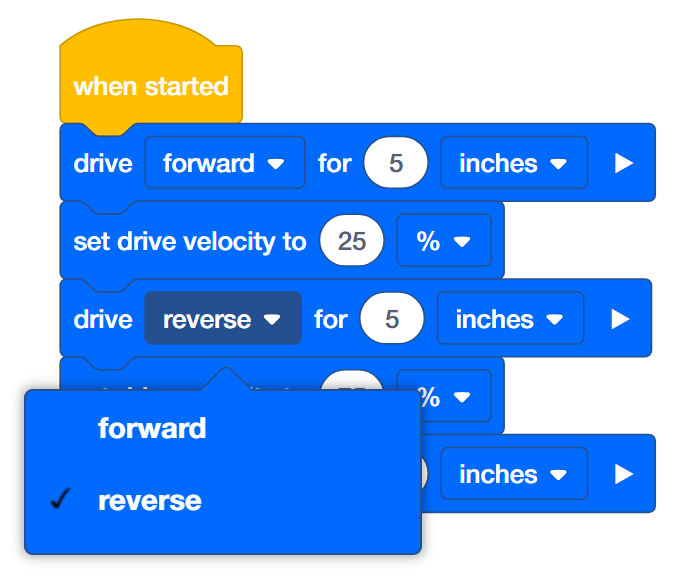
- प्रोग्रामर को ब्लॉक के लिए दूसरे ड्राइव को आगे की बजाय पीछे की ओर चलाना चाहिए।
- प्रोग्रामर को फिर करना चाहिए
- ड्राइवर को अब यह सुनिश्चित करके कि प्रोजेक्ट हाइलाइट किया गया है और चेक बटनदबाकर ऑटोपायलट रोबोट पर प्रोजेक्ट चलाना चाहिए।
![]() शिक्षक टूलबॉक्स
-
चरण 3 पूरा करना
शिक्षक टूलबॉक्स
-
चरण 3 पूरा करना
-
प्रोजेक्ट को पुनः सहेजने की कोई आवश्यकता नहीं है क्योंकि VEXcode IQ स्वतः सहेज लेगा।
-
[ड्राइव फॉर] ब्लॉक को फॉरवर्ड से रिवर्समें बदलने के लिए, बस ड्रॉपडाउन मेनू पर क्लिक करें और रिवर्सचयन करें।
-
यदि छात्र कंप्यूटर का उपयोग कर रहे हैं, तो उन्हें प्रोग्राम चलाने से पहले रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने की याद दिलाएं।
-
चूंकि हम नया स्लॉट नहीं चुन रहे हैं, इसलिए नया प्रोग्राम स्लॉट 1 पर डाउनलोड हो जाएगा और पिछले प्रोग्राम को प्रतिस्थापित कर देगा।