
വേഗതയുടെ പര്യവേക്ഷണം - ഭാഗം 2
ഘട്ടം 1: വീൽ ഹബ്ബിലേക്ക് ഒരു കണക്റ്റർ പിൻ ചേർക്കുക.

- മോട്ടോറും വീലും എത്ര വേഗത്തിൽ കറങ്ങുന്നുവെന്ന് നിങ്ങൾക്ക് എളുപ്പത്തിൽ കാണാൻ കഴിയുന്ന തരത്തിൽ, ബിൽഡർ വീൽ ഹബ്ബുകളിൽ ഒന്നിലേക്ക് 1x1 കണക്റ്റർ പിൻ ചേർക്കണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
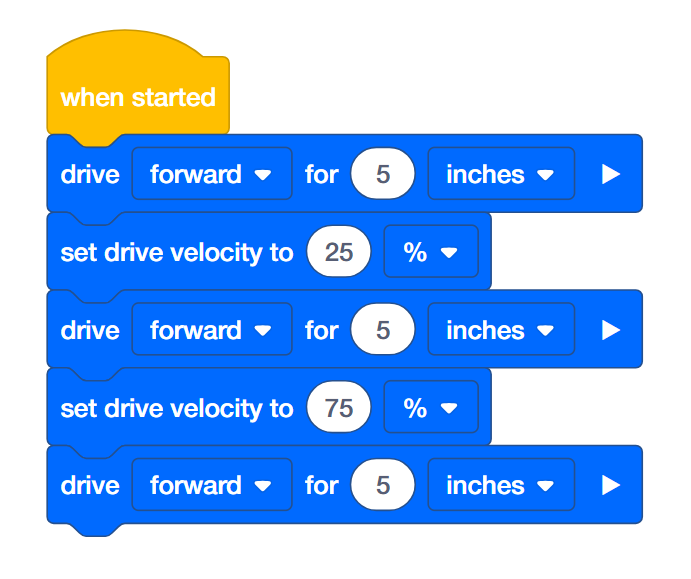
പ്രോഗ്രാമിംഗ് ഏരിയയിൽ, സ്ഥിരസ്ഥിതിയായി ഇതിനകം തന്നെ ഒരു {when started} ബ്ലോക്ക് ഉണ്ടെന്ന് ചൂണ്ടിക്കാണിക്കുക. എല്ലാ പ്രോഗ്രാമും ഈ ബ്ലോക്കിൽ നിന്നാണ് ആരംഭിക്കുന്നത്. പ്രോഗ്രാം ആരംഭിക്കുമ്പോൾ കണക്റ്റുചെയ്ത ബ്ലോക്കുകൾ അവ സ്ഥാപിച്ചിരിക്കുന്ന ക്രമത്തിൽ പിന്തുടരും.
[ഡ്രൈവ്] ബ്ലോക്കിൽ ക്ലിക്കുചെയ്ത് പ്രോഗ്രാമിംഗ് ഏരിയയിലേക്ക് വലിച്ചിടുന്നത് പ്രദർശിപ്പിക്കുക, അതിനെ {when started} ബ്ലോക്കിലേക്ക് ബന്ധിപ്പിക്കുക. അത് അറ്റാച്ച് ചെയ്യുമ്പോൾ ഒരു ക്ലിക്ക് കേൾക്കും.
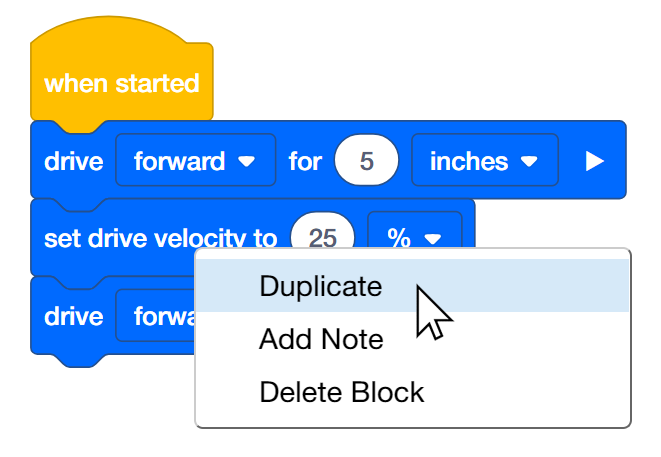
രണ്ടാമത്തെയും മൂന്നാമത്തെയും ബ്ലോക്കുകൾ നാലാമത്തെയും അഞ്ചാമത്തെയും ബ്ലോക്കുകൾക്ക് സമാനമാണ്. മൂന്നാമത്തെ ബ്ലോക്ക് ചേർത്തതിനുശേഷം, പ്രോഗ്രാമർക്ക് രണ്ടാമത്തെ ബ്ലോക്കിൽ വലത്- അല്ലെങ്കിൽ ദീർഘ-ക്ലിക്കുചെയ്ത് നാലാമത്തെയും അഞ്ചാമത്തെയും ബ്ലോക്കുകൾ ചേർക്കാൻ ഡ്യൂപ്ലിക്കേറ്റ് തിരഞ്ഞെടുക്കാം. അപ്പോൾ നാലാമത്തെ ബ്ലോക്കിന്റെ പ്രവേഗം 75% ആക്കി മാറ്റാം.
ഘട്ടം 2: വ്യത്യസ്ത വേഗതയിൽ 15 ഇഞ്ച് മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക.
-
പ്രോഗ്രാമർ ഈ പ്രോജക്റ്റ് VEXcode IQ-ൽ നിർമ്മിക്കണം.
-
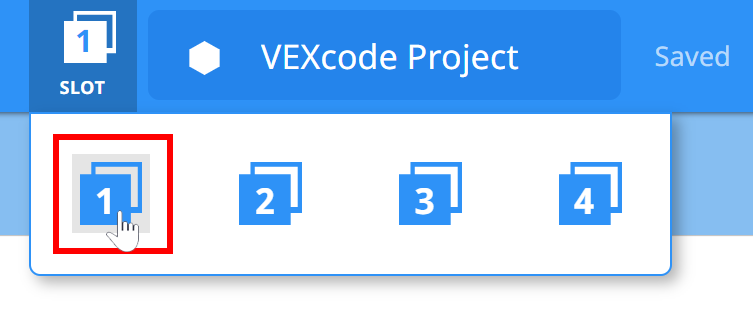
സ്ലോട്ട് ഐക്കണിൽ ക്ലിക്ക് ചെയ്യുക. റോബോട്ട് ബ്രെയിനിൽ ലഭ്യമായ നാല് സ്ലോട്ടുകളിൽ ഒന്നിലേക്ക് നിങ്ങളുടെ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാം. നമ്പർ 1 ൽ ക്ലിക്ക് ചെയ്യുക.
-
പ്രോഗ്രാമർ റോബോട്ടിനെ നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കണം. കണക്ഷൻ വിജയകരമായി സംഭവിച്ചുകഴിഞ്ഞാൽ, ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺ പച്ചയായി മാറുന്നു.

-
തുടർന്ന്, റോബോട്ട് ബ്രെയിനിലേക്ക് ഡ്രൈവ് വെലോസിറ്റി പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാൻ ടൂൾബാറിലെ ഡൗൺലോഡ് ബട്ടൺ ക്ലിക്ക് ചെയ്യുക.
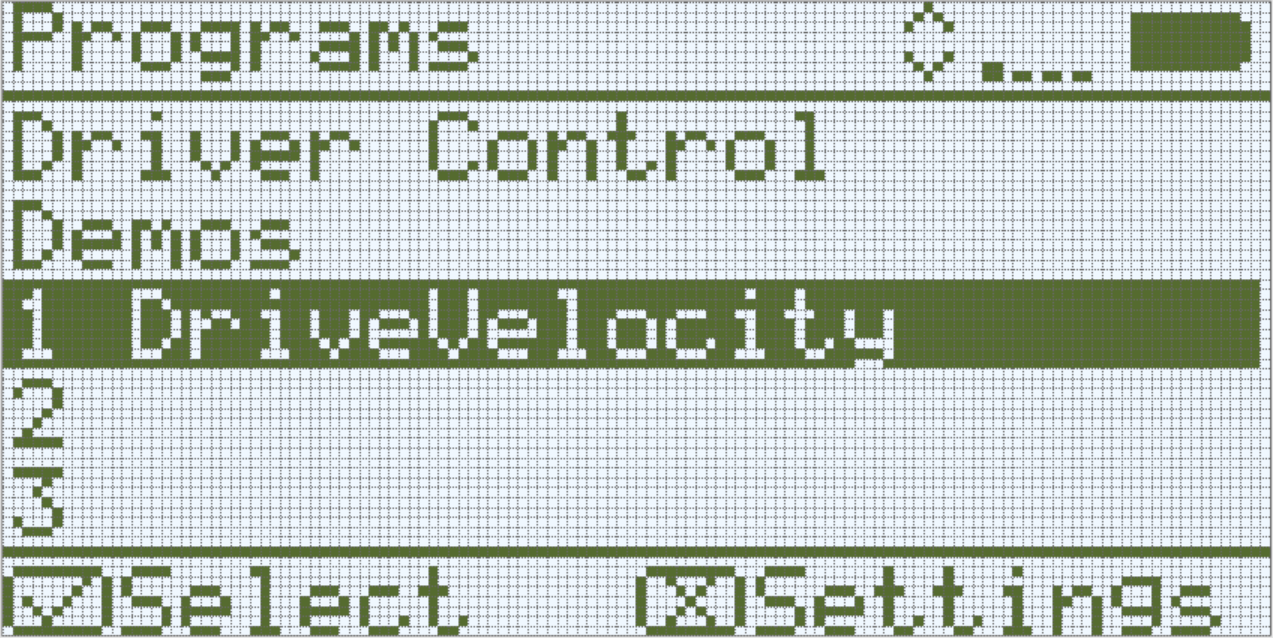
- റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് ഓട്ടോപൈലറ്റിന്റെ തലച്ചോറിലേക്ക് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടോ എന്ന് ഓപ്പറേറ്റർ ഉറപ്പാക്കണം. പ്രോജക്റ്റ് പേര് സ്ലോട്ട് 1-ൽ ലിസ്റ്റ് ചെയ്തിരിക്കണം.
- പ്രോജക്റ്റ് ഹൈലൈറ്റ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പുവരുത്തി ഡ്രൈവർ ഇപ്പോൾ ഓട്ടോപൈലറ്റ് റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കണം, തുടർന്ന് ചെക്ക് ബട്ടൺ അമർത്തണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ഈ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് ഓട്ടോപൈലറ്റ് റോബോട്ടിൽ പ്രവർത്തിപ്പിക്കുമ്പോൾ എന്ത് സംഭവിക്കുമെന്ന് വിദ്യാർത്ഥികൾക്ക് പ്രവചിക്കാൻ ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികളോട് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ പ്രവചനങ്ങൾ രേഖപ്പെടുത്താൻ പറയുക. സമയം അനുവദിക്കുമെങ്കിൽ, ഓരോ ഗ്രൂപ്പിനോടും അവരുടെ പ്രവചനം പങ്കിടാൻ ആവശ്യപ്പെടുക.ഓട്ടോപൈലറ്റ് ആദ്യം അതിന്റെ ഡിഫോൾട്ട് പ്രവേഗത്തിൽ (50%) മുന്നോട്ട് നീങ്ങുമെന്നും പിന്നീട് ഡിഫോൾട്ട് പ്രവേഗത്തേക്കാൾ പതുക്കെ (25%) നീങ്ങുമെന്നും പിന്നീട് ഡിഫോൾട്ട് പ്രവേഗത്തേക്കാൾ വേഗത്തിൽ (75%) നീങ്ങുമെന്നും വിദ്യാർത്ഥികൾ പ്രവചിക്കണം.
-
മോഡൽ ആദ്യം
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരേസമയം പരീക്ഷിക്കുന്നതിന് മുമ്പ് ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് നടത്തുന്ന മോഡൽ. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടുക, തറയിൽ വച്ചാൽ ഓട്ടോപൈലറ്റിന് 15 ഇഞ്ച് നീങ്ങാൻ ആവശ്യമായ ഇടം നൽകുക.വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്റ്റ് നടത്താനുള്ള ഊഴമാണ്. അവയ്ക്ക് വ്യക്തമായ പാതയുണ്ടെന്നും ഒരു ഓട്ടോപൈലറ്റും പരസ്പരം കൂട്ടിയിടിക്കുന്നില്ലെന്നും ഉറപ്പാക്കുക.
ഘട്ടം 3: വ്യത്യസ്ത വേഗതയിൽ മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യുക
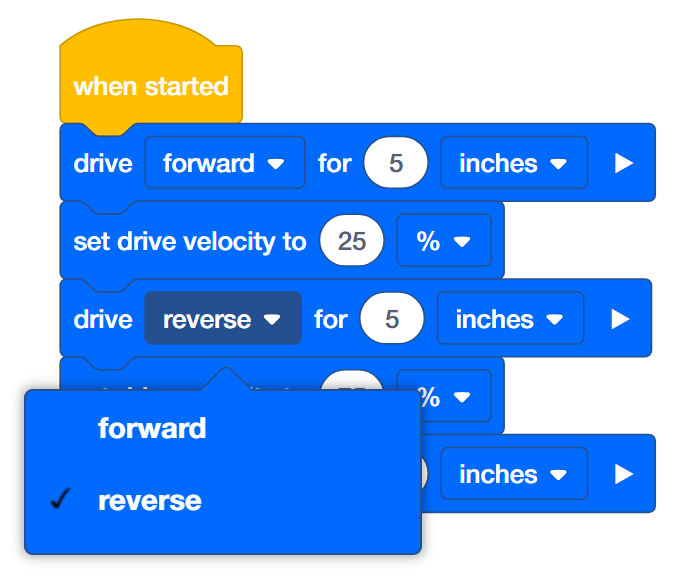
- പ്രോഗ്രാമർ ബ്ലോക്കിനുള്ള രണ്ടാമത്തെ ഡ്രൈവ് ഫോർവേഡ് ഡ്രൈവ് ചെയ്യുന്നതിന് പകരം റിവേഴ്സ് ഡ്രൈവ് ചെയ്യുന്നതിന് മാറ്റണം.
- പ്രോഗ്രാമർ .
- പ്രോജക്റ്റ് ഹൈലൈറ്റ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പുവരുത്തി, അമർത്തി ഡ്രൈവർ ഇപ്പോൾ ഓട്ടോപൈലറ്റ് റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 3 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 3 പൂർത്തിയാക്കുന്നു
-
VEXcode IQ ഓട്ടോസേവ് ചെയ്യുന്നതിനാൽ പ്രോജക്റ്റ് വീണ്ടും സേവ് ചെയ്യേണ്ട ആവശ്യമില്ല.
-
[drive for] ബ്ലോക്ക് forward ൽ നിന്ന് reverseആക്കി മാറ്റാൻ, ഡ്രോപ്പ്ഡൗൺ മെനുവിൽ ക്ലിക്ക് ചെയ്ത് reverseതിരഞ്ഞെടുക്കുക.
-
വിദ്യാർത്ഥികൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, പ്രോഗ്രാം പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരെ ഓർമ്മിപ്പിക്കുക.
-
നമ്മൾ പുതിയൊരു സ്ലോട്ട് തിരഞ്ഞെടുക്കാത്തതിനാൽ, പുതിയ പ്രോഗ്രാം സ്ലോട്ട് 1-ലേക്ക് ഡൗൺലോഡ് ചെയ്യുകയും മുമ്പത്തെ പ്രോഗ്രാമിന് പകരമാവുകയും ചെയ്യും.