
Eksplorasi Kecepatan - Bagian 2
Langkah 1: Tambahkan Pin Konektor ke Hub Roda.

- Pembangun harus menambahkan Pin Konektor 1x1 ke salah satu hub roda sehingga Anda dapat dengan mudah melihat seberapa cepat motor dan roda berputar.
 Kotak Peralatan Guru
Kotak Peralatan Guru
Tunjukkan bahwa di area pemrograman, sudah ada blok {when started} yang terletak di sana secara default. Setiap program akan dimulai dengan blok ini. Saat program dimulai, blok-blok yang terhubung akan diikuti dalam urutan penempatannya.
Tunjukkan klik pada blok [drive] dan seret ke area pemrograman, hubungkan ke blok {when started}. Anda akan mendengar bunyi klik saat menempel.
Blok kedua dan ketiga sama dengan blok keempat dan kelima. Setelah menambahkan blok ketiga, Programmer dapat mengklik kanan atau lama pada blok kedua dan memilih Duplikat untuk menambahkan blok keempat dan kelima. Kemudian kecepatan balok keempat dapat diubah menjadi 75%.

Langkah 2: Berkendara Maju sejauh 15 inci dengan Kecepatan Berbeda
-
Programmer harus membangun proyek ini dalam VEXcode IQ.

-
Klik ikon Slot. Anda dapat mengunduh proyek Anda ke salah satu dari empat slot yang tersedia di Robot Brain. Klik angka 1.

-
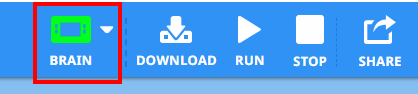
Programmer harus menghubungkan robot ke komputer atau tablet Anda. Ikon Otak pada bilah alat berubah menjadi hijau setelah koneksi berhasil dibuat.
-
Kemudian, klik tombol Unduh pada bilah alat untuk mengunduh proyek Drive Velocity ke Robot Brain.
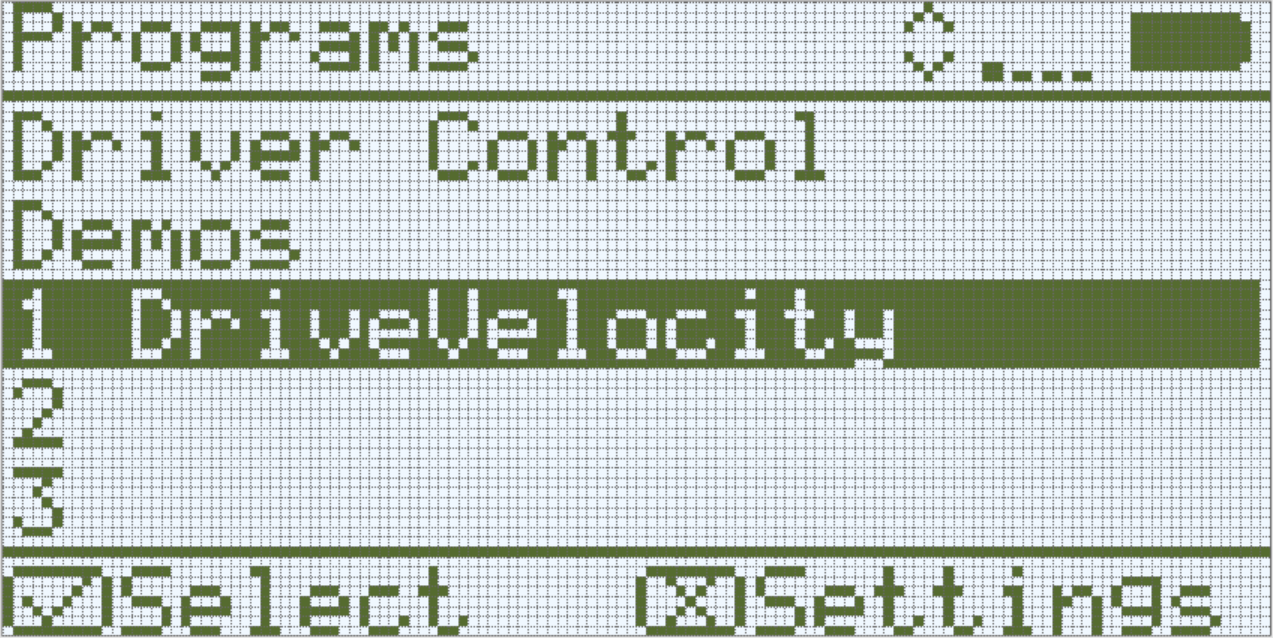
- Operator harus memeriksa untuk memastikan proyek Anda telah diunduh ke Otak Autopilot dengan melihat layar Otak Robot. Nama proyek harus dicantumkan pada slot 1.
- Pengemudi sekarang harus menjalankan proyek pada robot Autopilot dengan memastikan proyek disorot dan kemudian menekan tombol Periksa.
Kotak Peralatan Guru
-
Berhenti dan Diskusikan
Minta siswa untuk memprediksi apa yang menurut mereka akan terjadi ketika proyek ini diunduh dan dijalankan pada robot Autopilot. Mintalah siswa untuk mencatat prediksi mereka di buku catatan teknik mereka. Jika waktu memungkinkan, mintalah setiap kelompok untuk berbagi prediksi mereka.Siswa harus memperkirakan bahwa Autopilot akan terlebih dahulu bergerak maju pada kecepatan default-nya (50%), kemudian lebih lambat (25%) daripada kecepatan default, dan kemudian lebih cepat (75%) daripada kecepatan default.
-
Model Pertama
Model menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan siswa di satu area dan sisakan ruang yang cukup agar Autopilot dapat bergerak sejauh 15 inci jika diletakkan di lantai.Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka. Pastikan mereka memiliki jalur yang jelas dan tidak ada Autopilot yang saling bertabrakan.
Langkah 3: Berkendara Maju dan Mundur dengan Kecepatan Berbeda

- Programmer harus mengubah drive kedua untuk blok agar bergerak mundur, bukan maju.
- Programmer kemudian harus mengunduh proyek.
- Pengemudi sekarang harus menjalankan proyek pada robot Autopilot dengan memastikan proyek disorot dan menekan tombol Periksa.
Kotak Alat Guru
-
Menyelesaikan Langkah 3
-
Tidak perlu menyimpan proyek lagi karena VEXcode IQ akan menyimpan otomatis.
-
Untuk mengubah blok [drive for] dari maju ke mundur, cukup klik menu dropdown dan pilih mundur.
-
Jika siswa menggunakan komputer, ingatkan mereka untuk melepaskan kabel USB dari Robot Brain sebelum menjalankan program.
-
Karena kami tidak memilih slot baru, program baru akan diunduh ke Slot 1 dan menggantikan program sebelumnya.